
Разрешение конфликтов на шине
Когда сигналы, поступающие на шину, приходят на несколько контроллеров, система выбирает, в какой очередности будет обработан каждый. Два или более устройства могут начать работу практически одновременно. Чтобы при этом не возник конфликт, производится мониторинг. CAN-шина современного автомобиля производит эту операцию в процессе отправки сообщения.
Существует градация сообщений по приоритетной и рецессивной градации. Информация, имеющая самое низкое числительное выражение поля арбитража, выиграет при наступлении конфликтного положения на шине. Остальные передатчики постараются отослать свои фреймы позже, если ничего не изменится.
В процессе передачи информации время, указанное в нем, не теряется даже при наличии конфликтного положения системы.
Logging CAN data — example use cases
There are several common use cases for recording CAN bus data frames:
Logging/streaming data from cars
OBD2 data from cars can e.g. be used to reduce fuel costs, improve driving, test prototype parts and insurance
obd2
logging
Heavy duty fleet telematics
J1939 data from trucks, buses, tractors etc. can be used in fleet management to reduce costs or improve safety
j1939 telematics
Predictive maintenance
Vehicles and machinery can be monitored via IoT CAN loggers in the cloud to predict and avoid breakdowns
predictive
maintenance
Vehicle/machine blackbox
A CAN logger can serve as a ‘blackbox’ for vehicles or equipment, providing data for e.g. disputes or
diagnostics
can bus blackbox
Do you have a CAN logging use case? Reach out for free sparring!
Contact us
Защита от угона
Модуль iCAN устанавливается в каком угодно узле, где расположены жгуты, в месте установки шины. Из-за минимальных габаритов и особого алгоритма действий выявить блокировку обычными методами при совершении угона практически нереально.
Внешне этот модуль маскируется под разные контролирующие датчики, что также делает невозможным его обнаружение. При желании возможно настроить работу прибора для автоматической защиты им стекол автомобиля, зеркал.
При наличии у транспортного средства автозапуска двигателя, iCAN не помешает его работе, так как срабатывает при старте движения.
Ознакомившись с устройством и принципами обмена данными, которой наделена CAN-шина, становится понятным, почему все современные автомобили применяют эти технологии при разработке управления транспортным средством.
Представленная технология по своему устройству довольно сложна. Однако все заложенные в нее функции обеспечат максимально эффенктивное, безопасное и комфортное управление автомобилем.
Существующие разработки помогут обеспечить защиту транспортного средства даже от угона. Благодаря этому, а также комплексу других фунций, шина-CAN популярна и востребована.
Кабели
Нельзя прокладывать витую пару в непосредственной близости от кабелей 220 В.
- Использовать для соединения витую пару пятой категории, толщиной AWG 24.
- При использовании FTP Cat. 5e или STP Cat. 5e, оплетку или экран кабеля, а также неиспользованные провода, надо заземлять на одном конце кабеля.
- Иначе, если не заземлить или заземлить на двух концах, будет хуже.
- При использовании UTP Cat. 5e, оплетки нет и заземлять ничего не надо, результат хороший, можно рекомендовать для несложных условий.
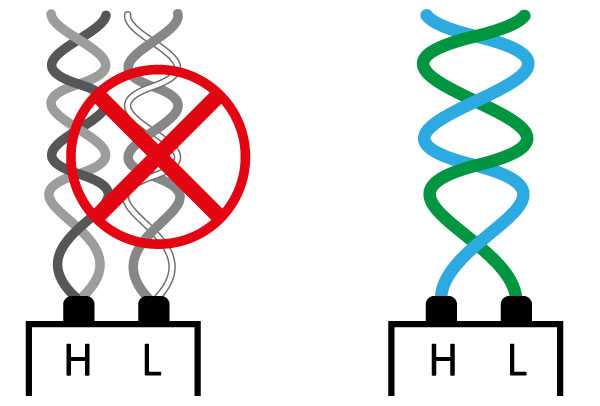
- При использовании кабеля витой пары с двумя или четырьмя витыми парами, необходимо использовать только одну из них для шины данных.
Соединять витую пару вместе и использовать как единый провод недопустимо!
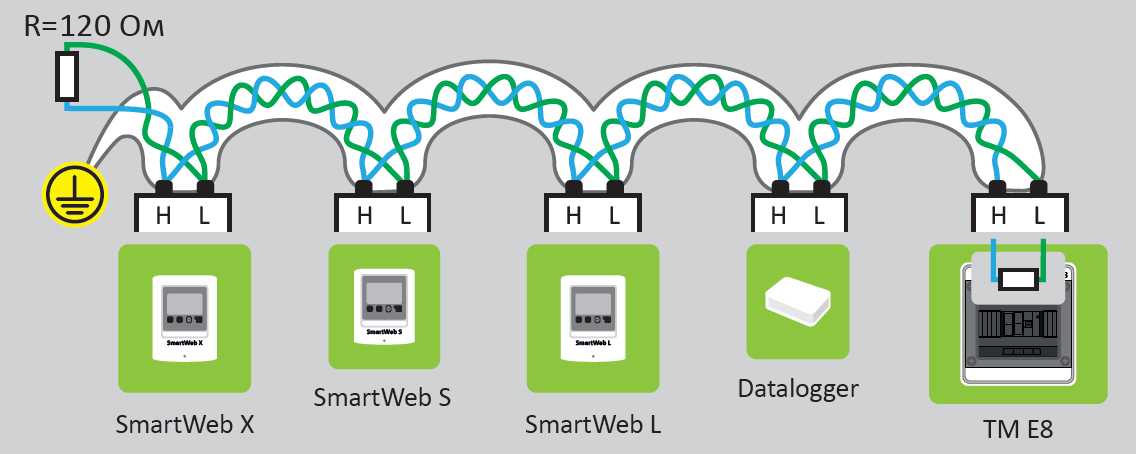
Терминирующий резистор
На обоих концах линии должен быть терминирующий резистор 120 Ом, между проводами H и L.
На контроллерах SmartWeb резистор можно вставить в свободный парный порт шины CAN.
На контроллерах Kromschröder E8 резистор можно включить или выключить, используя настройку ТЕХНИК — СХЕМА — ИЗОЛ ШИНЫ.
Особенности:
- SmarWeb S/L/X — можно воткнуть резистор в свободный парный порт шины.
- DataLogger — можно воткнуть резистор в свободный парный порт шины или включить резистор замыканием соответствующего джампера на плате.
- Kromschröder E8.0634 — по умолчанию этот резистор программно включен
- Kromschröder E8.1124 — по умолчанию этот резистор программно выключен
- Lago FB, BM8 — нет возможности включить резистор. Либо устанавливать вручную, либо не ставить их в конце линии
-
TM-E8 — резистор установлен на плате и выключить его нельзя, поэтому TM-E8 обязательно должен быть на конце линии.
Рекомендуемая схема подключения следующая: SmartWeb S/L/X — DataLogger — TM-E8
или E8.0634 — E8.1124 — Lago FB — BM8 — TM-E8
Преимущества и недостатки шины LIN
Шина LIN (Local Interconnect Network) является одной из популярных систем шин в автомобильной отрасли. Она предоставляет низкоскоростную, недорогую и простую в установке альтернативу шине CAN (Controller Area Network). Несмотря на свои преимущества, шина LIN также имеет свои недостатки.
Преимущества шины LIN:
- Низкая стоимость: Шина LIN является относительно дешевым решением по сравнению с другими системами шин, включая шину CAN. Это делает ее привлекательной для использования в бюджетных моделях автомобилей.
- Простота в установке: Шина LIN имеет простую и понятную архитектуру, что упрощает ее установку и подключение в автомобиле. Это позволяет сократить время и затраты на проведение работ.
- Низкое энергопотребление: Шина LIN потребляет меньше энергии, чем другие системы шин. Это особенно полезно для электронных компонентов автомобилей, которые требуют низкого энергопотребления.
Недостатки шины LIN:
- Ограниченная скорость передачи данных: Шина LIN имеет низкую скорость передачи данных, что ограничивает ее применение в некоторых случаях, где требуется высокая скорость обмена информацией, например, для передачи видеоданных.
- Ограниченное количество устройств: Шина LIN имеет ограниченное количество устройств, которые можно подключить. Это ограничение может быть неприемлемым для некоторых сценариев, где требуется большое количество устройств.
- Ограниченный дальний диапазон: Шина LIN предназначена для использования внутри автомобиля и имеет ограниченный дальний диапазон передачи данных. Это ограничение делает ее неэффективной для применения в системах, где требуется передача данных на большие расстояния.
Необходимо учитывать все преимущества и недостатки шины LIN при выборе правильной системы шин для конкретного применения в автомобиле.
Разновидность функций шин
Рассмотрим, какие существуют функции у различных девайсов.
Девайс для автомобильного двигателя
При соединении устройства обеспечивается быстрый канал передачи данных, по которому информация распространяется со скоростью 500 кбит/с. Основное предназначение шины заключается в синхронизации работы управляющего модуля, к примеру, коробки передач и мотора.
Устройство типа Комфорт
Скорость передачи данных по этому каналу более низкая и составляет 100 кбит/с. Функция такой шины заключается в соединении всех устройств, относящихся к данному классу.
Информационно-командный девайс
Скорость передачи данных такая же, как и в случае с устройствами типа Комфорт. Главная задача шины заключается в обеспечении связи между обслуживающимися узлами, к примеру, мобильным девайсом и системой навигации.
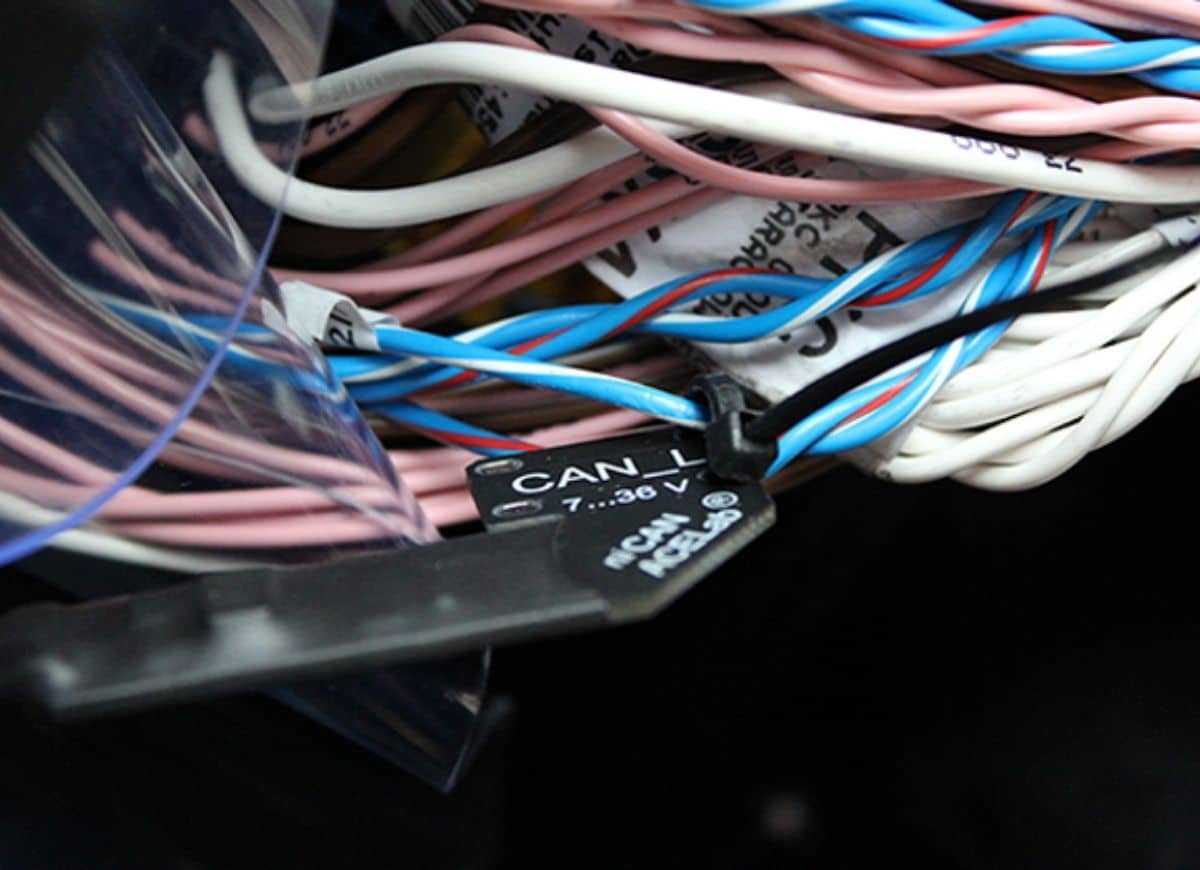
Шины от разных производителей приведены на фото.
CAN модуль (контроллер шины CAN) MCP2515
Модуль MCP2515 включает в себя CAN контроллер MCP2515, который представляет собой высокоскоростной CAN приемопередатчик. Соединение модуля MCP2515 с микроконтроллером осуществляется с помощью интерфейса SPI, поэтому его легко подключить ко всем микроконтроллерам с данным интерфейсом.
Начинающим изучение CAN-шины целесообразно начинать именно с этого модуля ввиду его простоты и легкости подключения к большинству современных микроконтроллеров.
Основные технические характеристики модуля MCP2515:
- включает в себя высокоскоростной CAN приемопередатчик TJA1050;
- размеры модуля: 40×28mm;
- управление по интерфейсу SPI с возможностью подключения к CAN-шине нескольких устройств;
- кварцевый генератор на 8 МГц;
- сопротивление на концах 120 Ом;
- включает независимый ключ, светодиодный индикатор, индикатор мощности;
- поддерживает скорости передачи данных до 1 Мбит/с;
- низкий потребляемый ток в режиме ожидания;
- возможность подключения до 112 устройств (узлов).
Назначение контактов (распиновка) CAN модуля MCP2515 представлено в следующей таблице.
| Наименование контакта | Назначение контакта |
| VCC | контакт питания 5 В |
| GND | общий провод (земля) |
| CS | SPI SLAVE select pin (Active low) (выбор ведомого) |
| SO | SPI master input slave output lead |
| SI | SPI master output slave input lead |
| SCLK | контакт синхронизации SPI |
| INT | контакт прерывания MCP2515 |
В данном проекте мы будем передавать данные, считываемые с датчика температуры и влажности DHT11 платой Arduino Nano, плате Arduino Uno с помощью CAN модуля MCP2515.
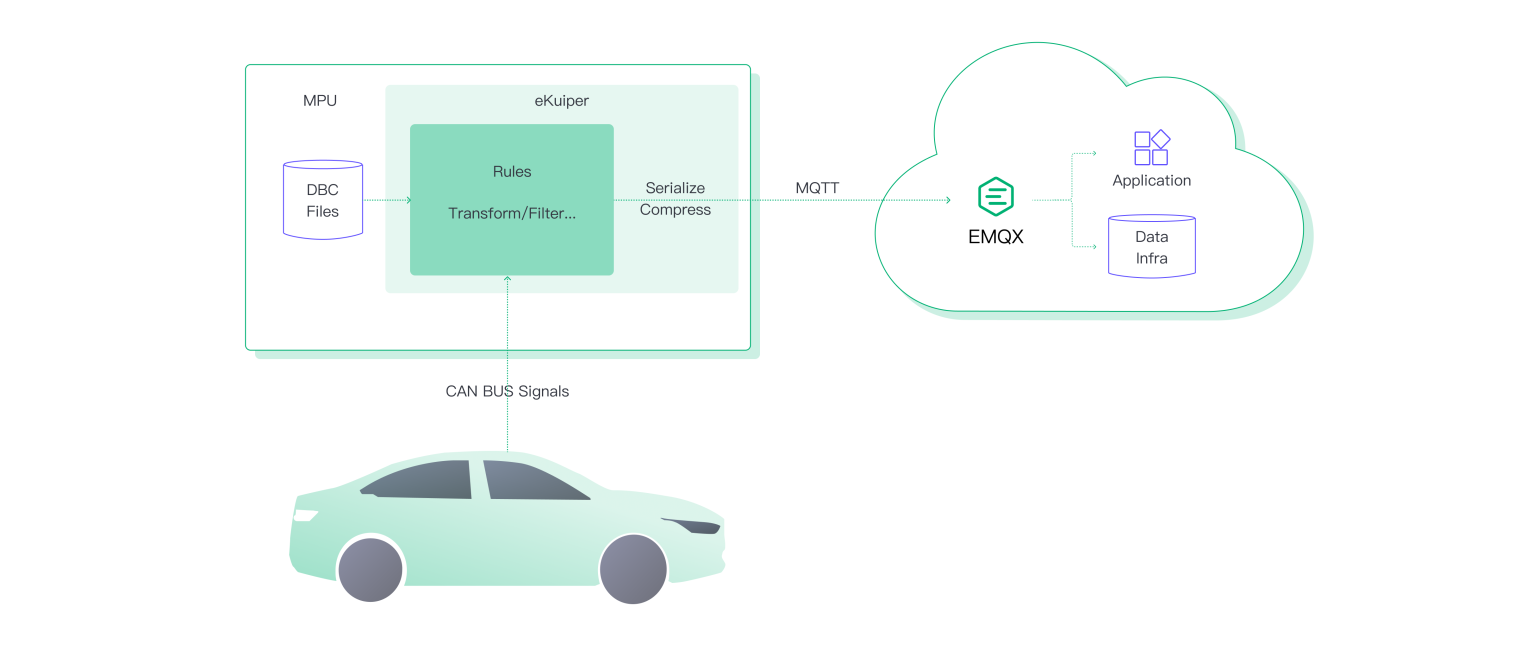
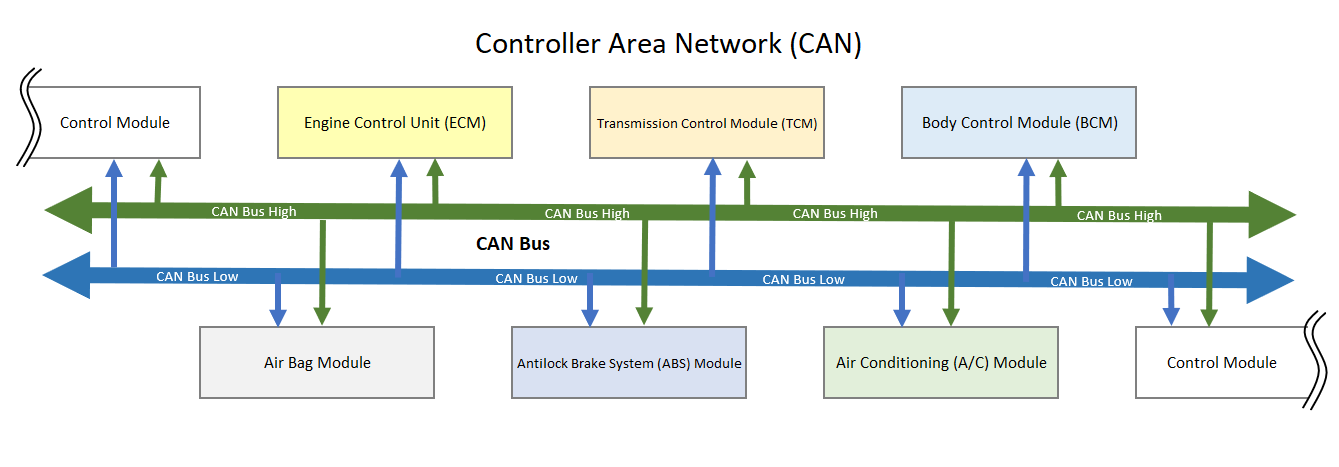
What is CAN Bus?
Control Area Network (CAN) bus is a serial communication protocol that allows devices to exchange data in a reliable and efficient way. It is widely used in vehicles, working like a nervous system to connect ECUs in the vehicle.
CAN bus was originally designed for automotive applications by Bosch in the 1980s. It is a multi-master, multi-slave, half-duplex, and fault-tolerant protocol that fits well with the requirements of automotive applications. It is simple, low-cost, and reliable and can be used in harsh environments. The CAN bus provides one point of entry for all the ECUs in the vehicle, which makes it easy to connect and diagnose.
CAN bus data can provide valuable insights into the performance and status of the connected devices. However, collecting and processing CAN bus data can be challenging due to the high data rate, low bandwidth, and variable network conditions.
![Can bus explained - a simple intro [2023]
– css electronics](https://okz-rybinsk.ru/wp-content/uploads/7/8/f/78fa304e27265e760b61e8fab3f570d8.jpeg)



One possible solution to overcome these challenges is to use MQTT, enabling timely data transmission from cars to cloud even with weak network conditions. EMQX is an open-source MQTT broker that can help you build a reliable and scalable MQTT infrastructure for collecting CAN bus data.
Что такое CAN-шина и принцип ее работы
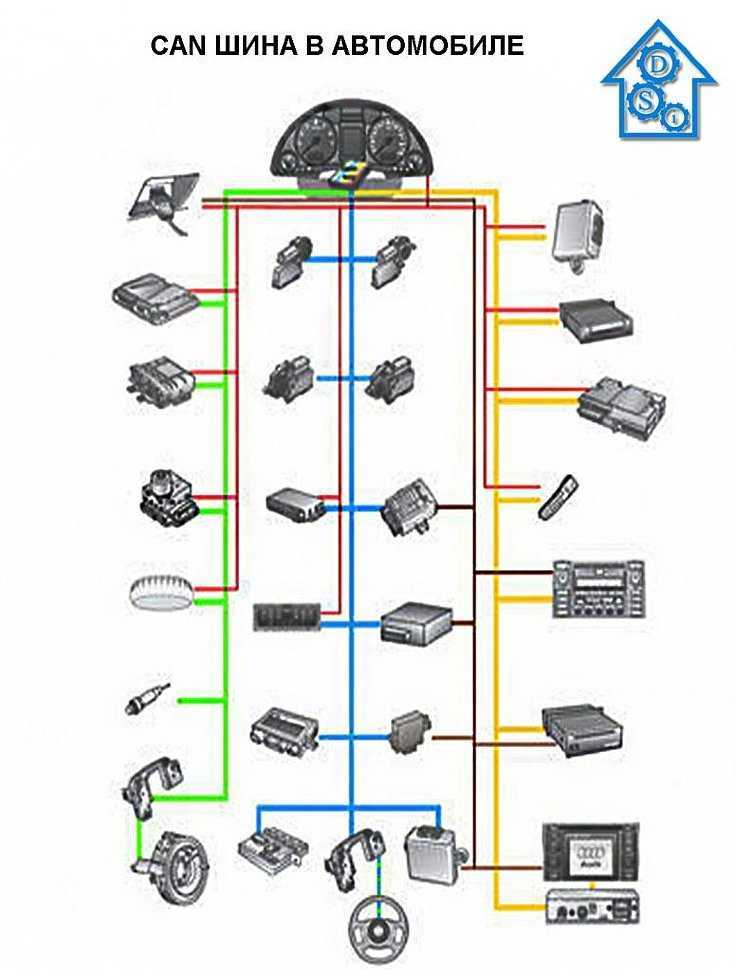
КАН-шина представляет собой сеть контроллеров. Устройство используется для объединения всех управляющих модулей автомобиля в одну рабочую сеть с общим проводом. Этот девайс состоит из одной пары кабелей, которая называется CAN. Информация, передающаяся по каналам из одного модуля на другой, отправляется в закодированном виде.
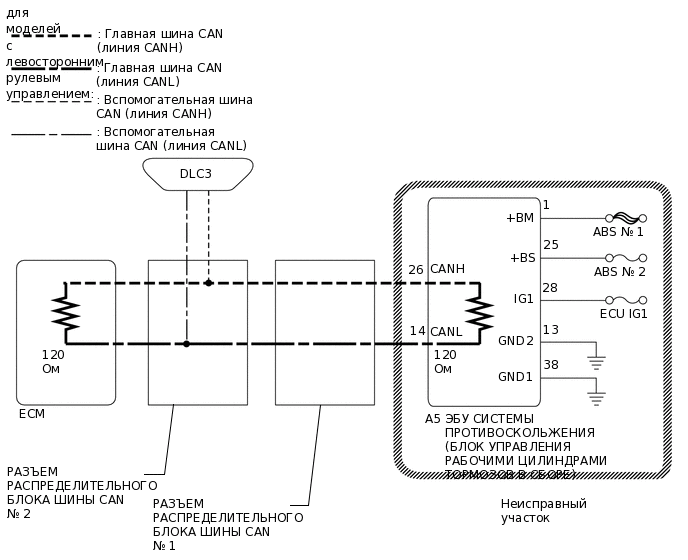
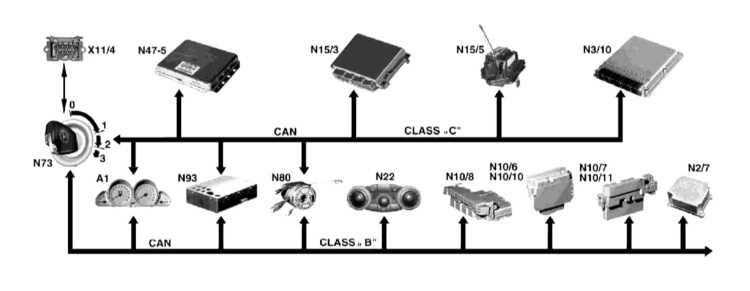
Схема подключения устройств к CAN-шине в Мерседесе
Какие функции может выполнять CAN-шина:
- подключение к автомобильной бортовой сети любых девайсов и устройств;
- упрощение алгоритма подсоединения и функционирования вспомогательных систем машины;
- блок может одновременно получать и передавать цифровые данные из разных источников;
- использование шины снижает воздействие внешних электромагнитных полей на функционирование основных и вспомогательных систем машины;
- CAN-шина позволяет ускорить процедуру передачи информации к определенным устройствам и узлам автомобиля.
Эта система работает в нескольких режимах:
- Фоновый. Все устройства отключены, но на шину подается питание. Величина напряжения слишком мала, поэтому разрядить аккумуляторную батарею шина не сможет.
- Режим запуска. Когда автолюбитель вставляет ключ в замок и проворачивает его либо жмет кнопку Старта, происходит активация устройства. Включается опция стабилизации питания, которое подается на контроллеры и датчики.
- Активный режим. В этом случае между всеми контроллерами и датчиками происходит обмен данными. При работе в активном режиме параметр потребления энергии может быть увеличен до 85 мА.
- Режим засыпания или отключения. При глушении силового агрегата контроллеры КАН перестают функционировать. При включении режима засыпания все узлы машины отключаются от бортовой сети.
Канал Виалон СУшка в своем видео рассказал о КАН-шине и что надо знать про ее эксплуатацию.
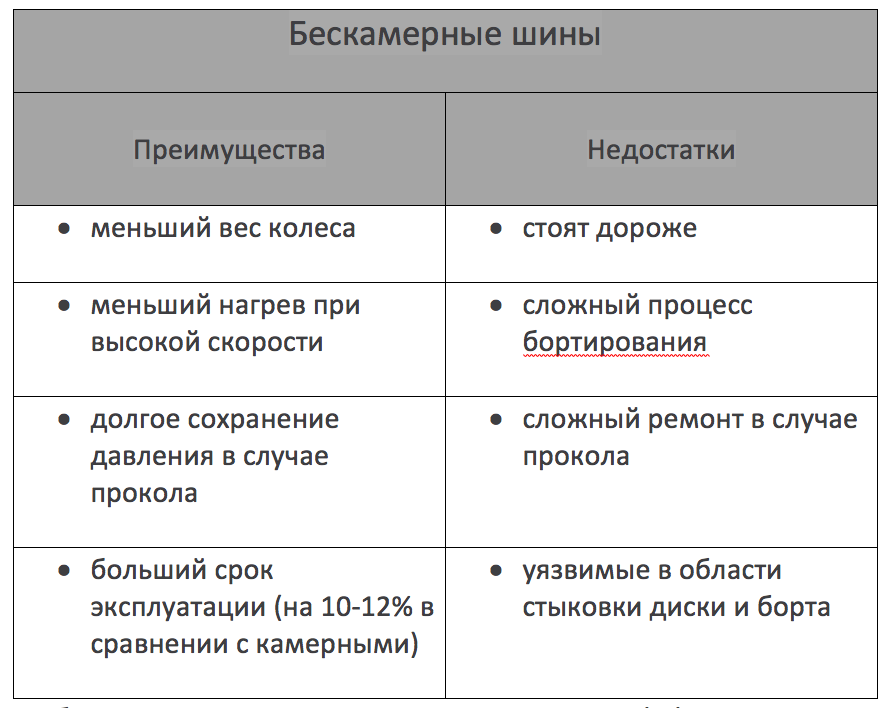
Плюсы и минусы
Какими преимуществами обладает КАН-шина:
- Простота установки устройства в автомобиль. Владельцу машины не придется тратиться на монтаж, поскольку выполнить эту задачу можно самостоятельно.
- Быстродействие устройства. Девайс позволяет быстро обмениваться информацией между системами.
- Устойчивость к воздействию помех.
- Все шины обладают многоуровневой системой контроля. Ее использование дает возможность предотвратить появление ошибок при передаче и приеме данных.
- В процессе функционирования шина автоматически разбрасывает скорость по разным каналам. Это позволяет обеспечить оптимальную работу всех систем.
- Высокая безопасность устройства, при надобности система блокирует несанкционированный доступ.
- Большой выбор устройств различных типов от разных производителей. Можно подобрать вариант, предназначенный для конкретной модели авто.
Какие недостатки характерны для устройства:
- В девайсах бывают ограничения по объему передаваемых данных. В современных автомобилях используется множество электронных девайсов. Их большое количество приводит к высокой загруженности канала передачи информации. Это становится причиной увеличения времени отклика.
- Большая часть отправляющихся по шине данных обладает конкретным назначением. На полезную информацию отводится маленькая часть трафика.
- При использовании протокола высшего уровня автовладелец может столкнуться с проблемой отсутствия стандартизации.
Разновидности функций шин
Существуют разные типы представленного устройства.

- КАН-шина агрегата силового. Это быстрый канал, который передает послания со скоростью 500 кбит/с. Его главная задача заключается в коммуникации блоков управления, например трансмиссия-двигатель.
- Система «Комфорт» — более медлительный канал, передающий данные со скоростью 100 кбит/с. Он связывает все устройства системы «Комфорт».
- Информационно-командная программа шины также передает сигналы медленно (100 кбит/с). Ее основное предназначение — обеспечить связь между обслуживающими системами, например телефоном и навигацией.
При изучении вопроса, чем является CAN-шина, может показаться, что по количеству программ она похожа на систему самолета. Однако, дабы обеспечить качество, безопасность и комфорт при управлении автомобилем, никакие программы не будут лишними.
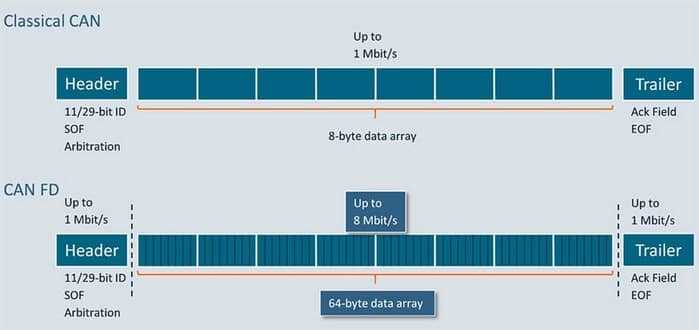
Что такое CAN FD (Flexible Data Rate CAN)?
С расширением функциональности автомобиля возрастает и нагрузка на CAN-шину. CAN FD (Flexible Data Rate) была разработана как шина CAN «следующего поколения».

Стандартная длина каждого сообщения была увеличена в 8 раз — с 8 до 64 байт, а максимальная скорость передачи данных была аналогично увеличена с 1 Мбит/с до 8 Мбит/с. Одним словом, CAN FD повышает скорость и эффективность. Поэтому она используется в современных автомобилях.
CAN FD обратно совместим и поддерживает протокол CAN 2.0, а также специальные протоколы, такие как SAE J1939.
CAN FD по сути является расширением оригинального стандарта CAN, как указано в ISO 11898-1, и полностью совместим с классическими CAN-шинами.
Отличия CAN FD от обычной CAN-шины
- CAN FD работает одновременно на двух скоростях. Поле арбитража или заголовок кадра передается со стандартной скоростью, например 500 кбит/с. А поле данных передается на скорости в несколько раз выше, вплоть до 8 Мбит/с.
- Размер сообщения увеличен до 64 байт. В обычной CAN-шине — максимум 8 байт.
- Контроллер CAN FD способен принимать обычные CAN сообщения, а стандартный CAN узел не может принимать кадры формата CAN FD.
- Для шины CAN FD нужны специальные микросхемы-трансиверы с повышенным быстродействием.
В настоящее время CAN FD используется в высокопроизводительных автомобилях, но по мере развития ЭБУ и снижения стоимости аппаратного обеспечения CAN FD, это лишь вопрос времени, когда CAN FD появится практически во всех автомобилях.
CAN standards
The original specification is the Bosch specification. Version 2.0 of
this specification is divided into two parts:
- Standard CAN (Version 2.0A). Uses 11 bit identifiers.
- Extended CAN (Version 2.0B). Uses 29 bit identifiers.
The two parts define different formats of the message frame, with the
main difference being the identifier length.
There are two ISO standards for CAN. The difference is in the physical
layer, where ISO 11898 handles high speed applications up to 1Mbit/second.
ISO 11519 has an upper limit of 125kbit/second.
Part A and Part B compatibility
There are three types of CAN controllers: Part A, Part B passive and Part
B. They are able to handle the different parts of the standard as follows:
| Message format \ CAN chip type | Part A | Part B Passive | Part B |
| 11 bit ID | ok | ok | ok |
| 29 bit ID | ERROR!! | tolerated on the bus, but ignored | ok |
Most 2.0A controllers transmit and receive only Standard format messages,
although some (known as 2.0B passive) will receive Extended format messages
but then ignore them. 2.0B controllers can send and receive messages in both
formats. Note that if 29 bit identifiers are used on a bus which contains
part A controllers, the bus will not work!!!
CAN implementations
Different implementations — BasicCAN and FullCAN
There is no standard for how CAN controllers shall be implemented or how
they shall communicate with their host microcontroller. There are two main
implementation strategies for CAN controllers today. They are called
BasicCAN and FullCAN.
The main difference between these strategies is how interesting messages
are filtered out, that is how it is decided what messages are interesting
and which are not. There are also differences in how remote frames are
answered, and on how messages are buffered. The differences will effect how
much load is put on the host microcontroller.
BasicCAN
BasicCAN is usually used in cheaper standalone CAN controllers or in
smaller microcontrollers with integrated CAN controller.
A BasicCAN controller normally has two receive buffers and one transmit
buffer. The receive buffers are arranged in a FIFO structure, and a message
can be received into the one buffer while the microcontroller is reading the
information from the other buffer. If a message is received while both
receive buffers are full, the oldest messages are kept. This means that
newer messages might be lost if the host microcontroller does not read the
messages fast enough.
A message is sent by writing it to the transmit buffer.
Interesting messages are filtered out using two registers, that operate
on the message identifier. Each bit in the identifier are checked against
the filter. If the message matches the filter it is stored in one of the
receive buffers.
Each bit of the identifier filter can be set to ‘1’, ‘0’ or ‘don’t care’.
Often the filter only operates on eight of the eleven bits in the identifier
(standard CAN). This means the three lower bits in the identifier are always
‘don’t care’.
When BasicCAN is used it is important to choose identifiers with utmost
care, so that the window of the filter can be kept as small as possible. All
message that is let through the filter must be read and checked by the
microcontroller. This means that the final filtering is done in software.
A BasicCAN controller has no support for automatically answering remote
frames, which means that the application will have to handle them. This will
put extra load on the microcontroller or processor, but will make sure that
the value returned is updated.
BasicCAN features
| Transmit | The application fills complete Tx register including ID,RTR,datalength,data -> every ID can be transmitted |
| Receive | Every CAN message can be received Normally two receive buffers in FIFO structure Global message filtering. It is normally not possible to set up the filter so that only the interesting messages are let through -> final filtering must be done by the application |
| Remote frame handling | Remote frame are answered by the application |
| Overrun philosophy | Keep the oldest message (newer messages will be lost) |
FullCAN
FullCAN is used in more expensive, high performance CAN controllers and
microcontrollers. The FullCAN controller has a set of buffers called
mailboxes. On initialization, each mailbox is assigned an identifier and is
set to transmit or receive.
When transmitting a message the message length and data is written to the
transmit mailbox with the correct identifier.
With a FullCAN controller it is possible to filter out only the exact
message types that are interesting. This type of controller will therefore
give a lower load on the host microcontroller. However, the number of
mailboxes are limited. The largest number of mailboxes present in a CAN
controller today is ???.
FullCAN controllers have support for automatically answering remote
frames. This will decrease the load on the host microcontroller or
processor, but may also mean that old information is sent. It is very
important to take this into consideration when writing your application.
FullCAN features
| Transmit | Transmit mailboxes initialised once Only data bytes written before transmission |
| Receive | Only messages with the IDs defined in receive mailboxes can be received No double buffering for mailboxes Full acceptance filtering (only the exact message IDs are let through) |
| Remote frame handling | Remote frames are answered automatically by the controller |
| Overrun philosophy | Keep the newest message (older messages with the same ID will be lost) |
¶ Список параметров
Область «Список параметров» позволяет определить, с какими параметрами и командами может работать устройство при настройках, заданных в областях «Встроенный CAN» и «Внешний источник данных CAN».
Для отображения возможности работы с параметром введена следующая индикация:
- Если устройство может работать с параметром или командой по встроенному интерфейсу CAN, то параметр выделяется зеленым цветом.
- Если устройство может работать с параметром или командой при помощи внешнего адаптера CAN, то параметр выделяется жирным шрифтом.
- Если при заданных настройках устройства параметр не может быть получен, то он не выделяется ни цветом, ни жирным шрифтом.
CAN-параметры разделены на две группы:«Стандартные параметры» — параметры, которые наиболее часто встречаются при работе с CAN-шиной транспортных средств. Для таких параметров в протоколе обмена данными зарезервированы отдельные поля с четким описанием их назначения и размерности. Например, «Уровень топлива в баке, л».
«Дополнительные параметры» — параметры, которые редко встречаются при работе с CAN-шиной транспортных средств. Для таких параметров в протоколе обмена данными нет зарезервированных полей, и они передаются в составе пользовательских параметров. Например, «Поворот стрелы подъемного механизма, 0.1*».
Каждый параметр или группу параметров можно выбрать, установив напротив его названия флаг.
Если флаг установлен напротив параметра или группы параметров из списка «Стандартные параметры», то название параметра или группы станет доступно для выбора в настройках:
«Условия формирования дополнительного события «Изменились параметры CAN»» (вкладка «CAN-шина»).
Если флаг установлен напротив параметра или группы параметров из списка «Дополнительные параметры», то название параметра или группы станет доступно для выбора в настройках:
- «Условия формирования дополнительного события «Изменились параметры CAN»» (вкладка «CAN-шина»);
- «Пользовательские параметры» (вкладка «Настройка протокола»).
Дополнительные события
Эта группа настроек позволяет задать условия формирования пользовательских событий по изменению определенных параметров, которые были выбраны в областях «Данные сообщений CAN», «Считываемые стандартные параметры» и «Считываемые дополнительные параметры».
События «Изменились параметры CAN» передаются на сервер со следующими кодами: — «Изменились стандартные параметры CAN»; — «Изменились пользовательские параметры CAN»; — «Изменились дополнительные параметры CAN».
«Параметр» — этот список позволяет выбрать параметр, при изменении значения которого будет сформировано событие «Изменились параметры CAN».
«Условия формирования» — для выбора доступны 3 типа условий: «Изменение на порог», «Переход через границы» и «Вход/Выход из зоны». Каждый из типов имеет свои дополнительные настройки.



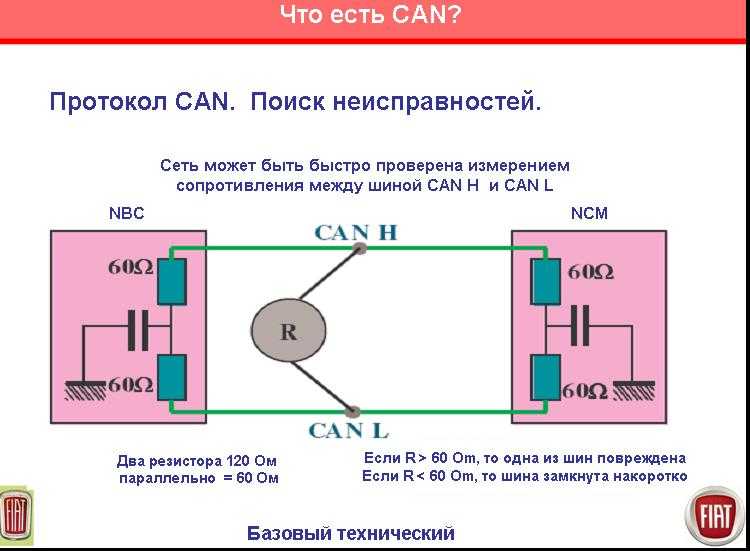
Недостатки CAN шины
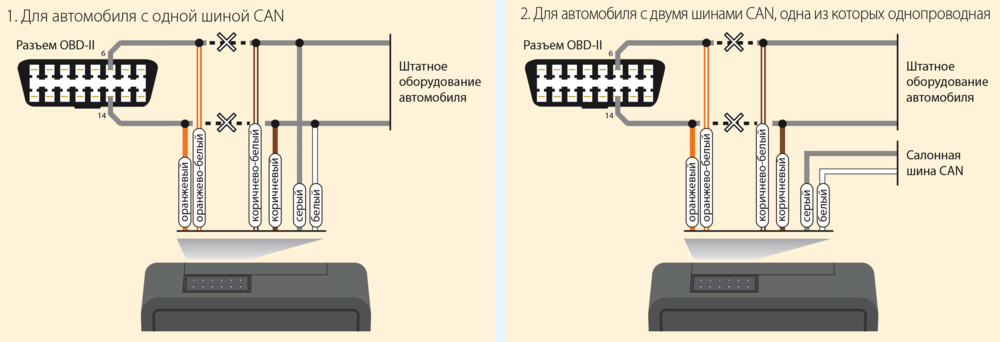
- К сожалению, наряду с неоспоримыми преимуществами, у системы CAN имеется также несколько существенных недостатков. Если какой –либо блок, включенный в шину, вышел из строя, он может заблокировать передачу данных, вследствие чего у автомобиля могут отключиться многие функции, а поиск неисправного блока может занять продолжительное время.
- Другой, не менее серьезный недостаток CAN шины – это открытость для злоумышленников. Дело в том, что все «высокотехнологичные» угоны автомобилей в наше время происходят через доступ к разъему OBD II. При доступе злоумышленников к CAN шине, автомобиль становится довольно легким объектом для угона. Особенно это касается автомобилей бизнес-класса. Чтобы обезопасить свой автомобиль рекомендуется перенести диагностический разъем в труднодоступное место и дополнительно оградить CAN шину от любого несанкционированного доступа.
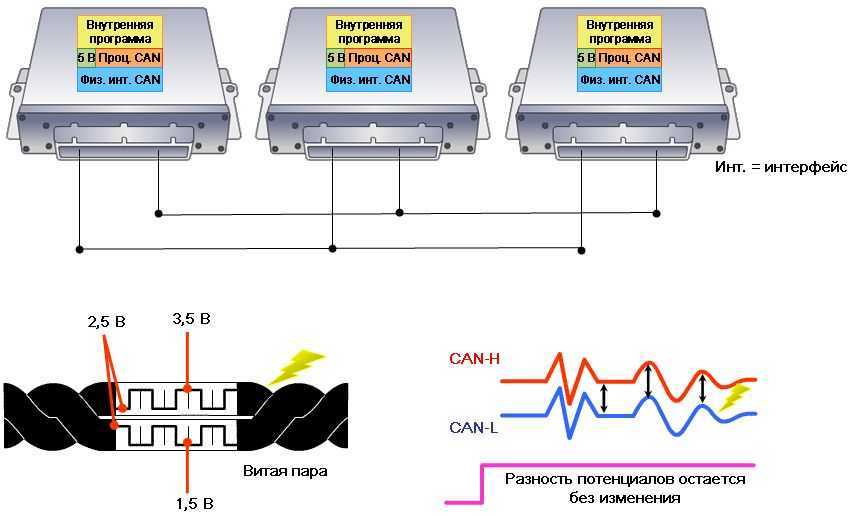
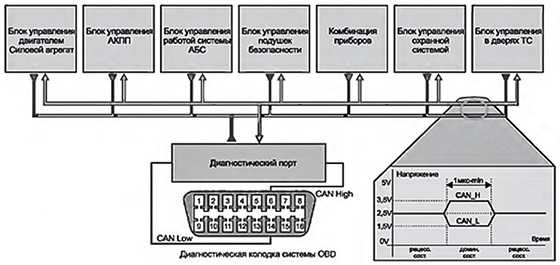
Реализации CAN на уровне электрических сигналов
CAN шина может быть реализована физически тремя способами:
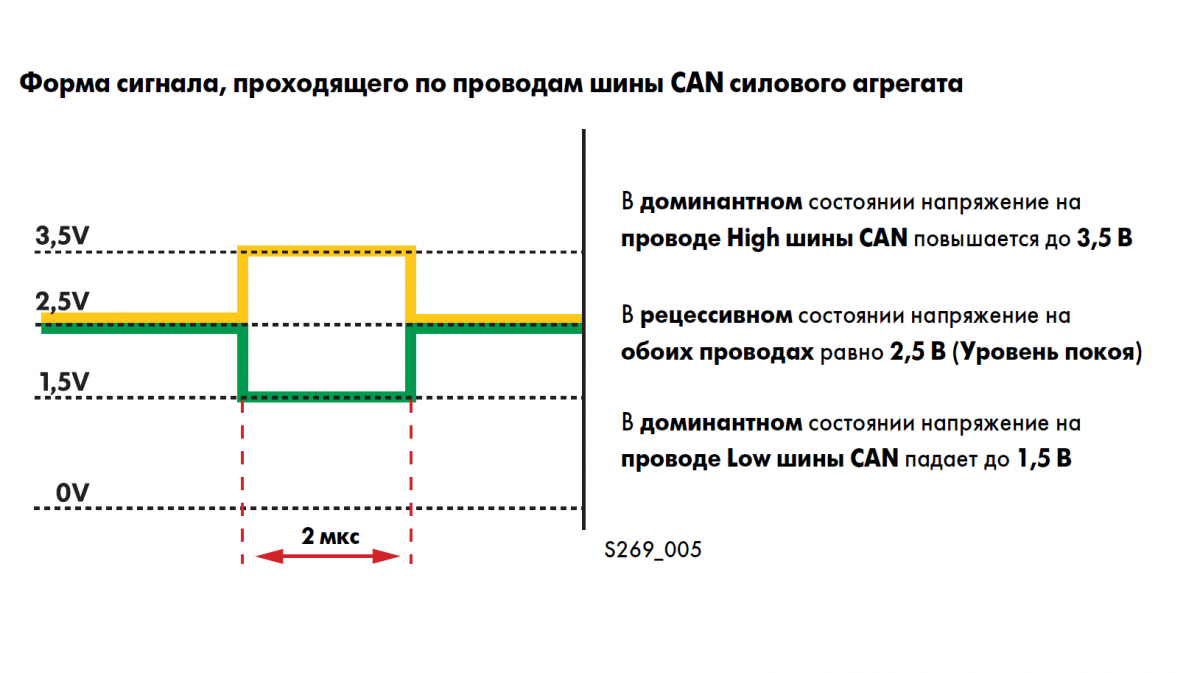
1 ISO11898-2 или CAN-High Speed.
Классическая витая пара нагруженная с обоих концов резисторами 120 Ом.
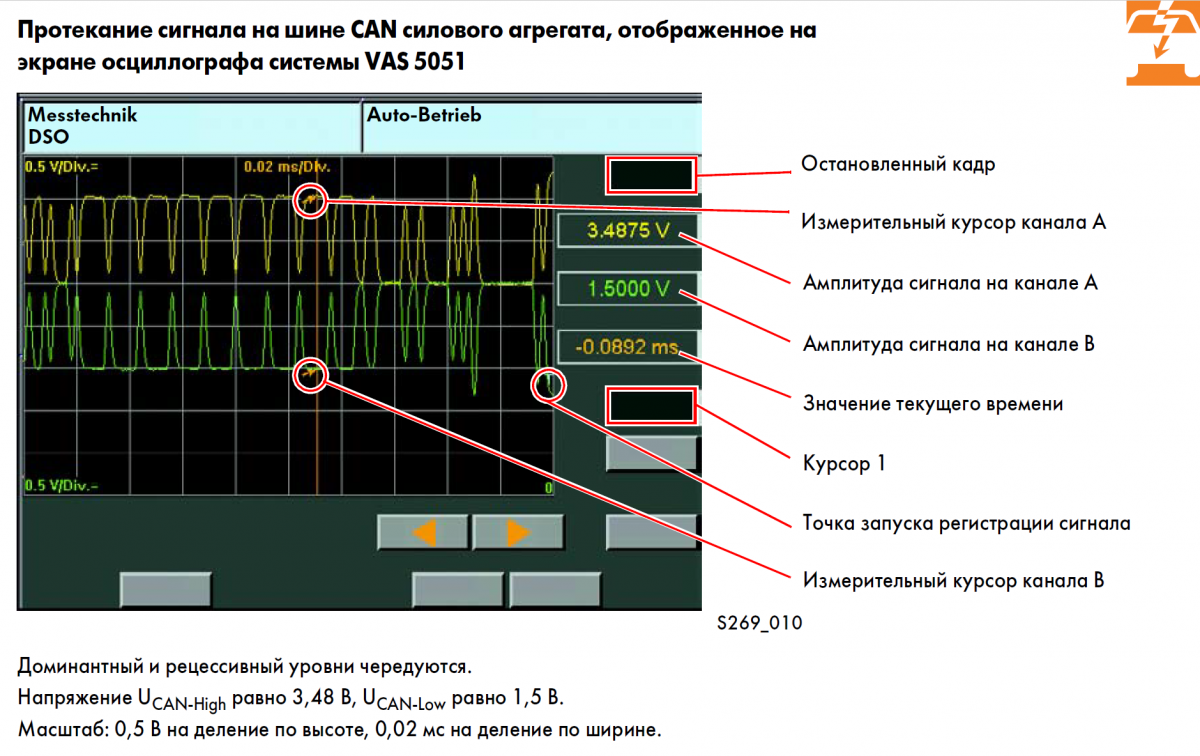
В этом случае уровни на шине CAN выглядят так:
Для такой реализации сети используются как правило обычные CAN трансиверы в 8 выводном корпусе, аналоги PCA82C250, TJA1050 и им подобные. Работает такая конфигурация на скоростях 500 кбит\с и выше. (Но могут быть исключения) .
2 ISO11898-3 или CAN-Low Speed или Faut Tolerant CAN
Такой вариант CAN шины способен переключаться в однопроводный режим в случае повреждения одной из линий. Работает на скоростях до 250 кбит\с.Уровни сигнала на шине отличаются от High Speed CAN, при этом не теряется возможность работы с шиной FT-CAN используя трансиверы High-Speed CAN и соблюдая ряд условий. Подробнее в нашей статье о FT-CAN – ссылка.
Fault tolerant CAN обычно используется для низкоскоростного обмена между блоками управления относящимися к сегменту сети Салон\Комфорт\Мультимедиа.
ВАЖНО: При подключении к шине Faul tolerant CAN, подключать терминальный резистор 120 Ом между линиями CAN-High и CAN-Low НЕ НУЖНО !
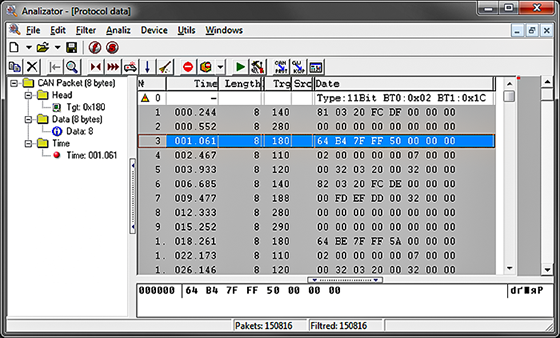
Message formats
Format of a CAN message
In a CAN system, data is transmitted and received using Message Frames.
Message Frames carry data from a transmitting node to one, or more,
receiving nodes.
The CAN protocol supports two Message Frame formats.
The two formats are:
— Standard CAN (Version 2.0A)
— Extended CAN (Version 2.0B)
Most 2.0A controllers transmit and receive only Standard format messages,
although some (known as 2.0B passive) will receive Extended format messages
but then ignore them. 2.0B controllers can send and receive messages in both
formats.
2.0A Format
A Standard CAN (Version 2.0A) Message Frame consists of seven different
bit fields:
— A Start of Frame (SOF) field. This is a dominant (logic 0) bit that
indicates the beginning of a message frame.
— An Arbitration field, containing an 11 bit message identifier and the
Remote Transmission Request (RTR) bit. A dominant (logic 0), RTR bit
indicates that the message is a Data Frame. A recessive (logic 1) value
indicates that the message is a Remote Transmission Request (otherwise known
as Remote Frame.) A Remote Frame is a request by one node for data from some
other node on the bus. Remote Frames do not contain a Data Field.
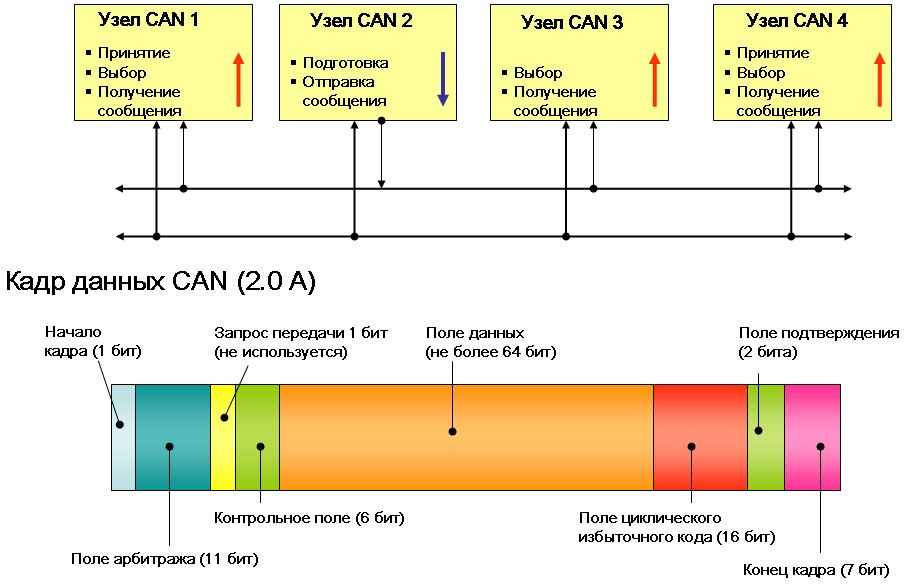
Fig CAN 2.0A Message Frame
— A Control Field containing six bits:
* two dominant bits (r0 and r1) that are reserved for future use, and
* a four bit Data Length Code (DLC). The DLC indicates the number of
bytes in the Data Field that follows
— A Data Field, containing from zero to eight bytes.
— The CRC field, containing a fifteen bit cyclic redundancy check code
and a recessive delimiter bit
— The ACKnowledge field, consisting of two bits. The first is the Slot
bit which is transmitted as a recessive bit, but is subsequently over
written by dominant bits transmitted from all other nodes that successfully
receive the message. The second bit is a recessive delimiter bit
— The End of Frame field, consisting of seven recessive bits.
Following the end of a frame is the INTermission field consisting of
three recessive bits. After the three bit INTermission period the bus is
recognised to be free. Bus Idle time may be of any arbitrary length
including zero.
2.0B Format
The CAN 2.0B format provides a twenty nine (29) bit identifier as opposed
to the 11 bit identifier in 2.0A.
Version 2.0B evolved to provide compatibility with other serial
communications protocols used in automotive applications in the USA. To
cater for this, and still provide compatibility with the 2.0A format, the
Message Frame in Version 2.0B has an extended format.
The differences are:
— In Version 2.0B the Arbitration field contains two identifier bit
fields. The first (the base ID) is eleven (11) bits long for compatibility
with Version 2.0A. The second field (the ID extension) is eighteen (18) bits
long, to give a total length of twenty nine (29) bits.
— The distinction between the two formats is made using an Identifier
Extension (IDE) bit.
Fig 4.CAN 2.0B Message Frame
— A Substitute Remote Request (SRR) bit is included in the Arbitration
Field. The SRR bit is always transmitted as a recessive bit to ensure that,
in the case of arbitration between a Standard Data Frame and an Extended
Data Frame, the Standard Data Frame will always have priority if both
messages have the same base (11 bit) identifier.
All other fields in a 2.0B Message Frame are identical to those in the
Standard format.
2.0A and 2.0B Compatibility
2.0B controllers are completely backward compatible with 2.0A controllers
and can transmit and receive messages in either format.
Note, however, that there are two types of 2.0A controllers:
— The first is capable of transmitting and receiving only messages in
2.0A format. With this type of controller, reception of any 2.0B message
will flag an error.
— The second type of 2.0A controller (known as 2.0B passive) is also
capable of sending and receiving 2.0A messages, but in addition, these
devices will acknowledge receipt of 2.0B messages and then ignore them.
Therefore, within the above mentioned constraints it is possible to use
both Version 2.0A (with 2.0B passive capabilities) and 2.0B controllers on a
single network.
However, because of the lack of full upward compatibility of 2.0A devices
with 2.0B devices, only messages in Standard format are meaningful in
systems using both types.
The number of unique identifiers available to users, on a single 2.0A
network, is 2,032 (2 to the power 11 — 2 to the power 4).
The number of unique identifiers available on a 2.0B network is in excess
of 500 million!
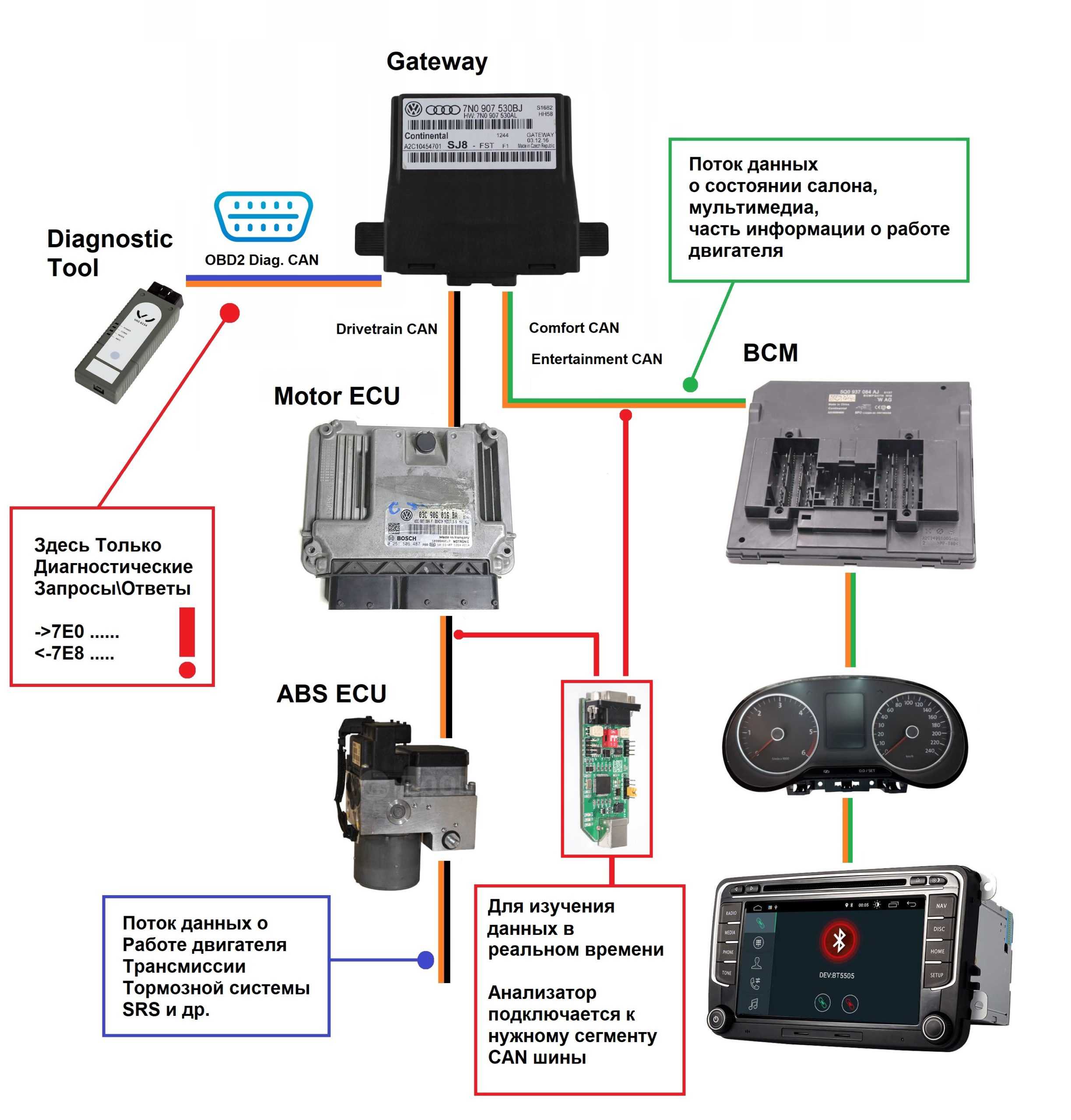
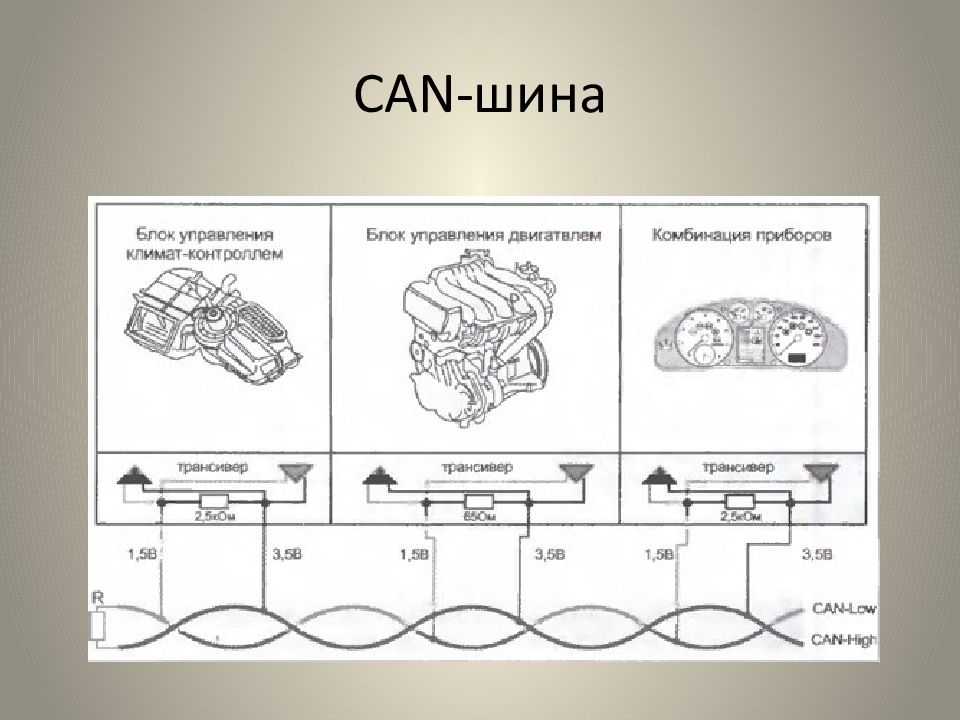
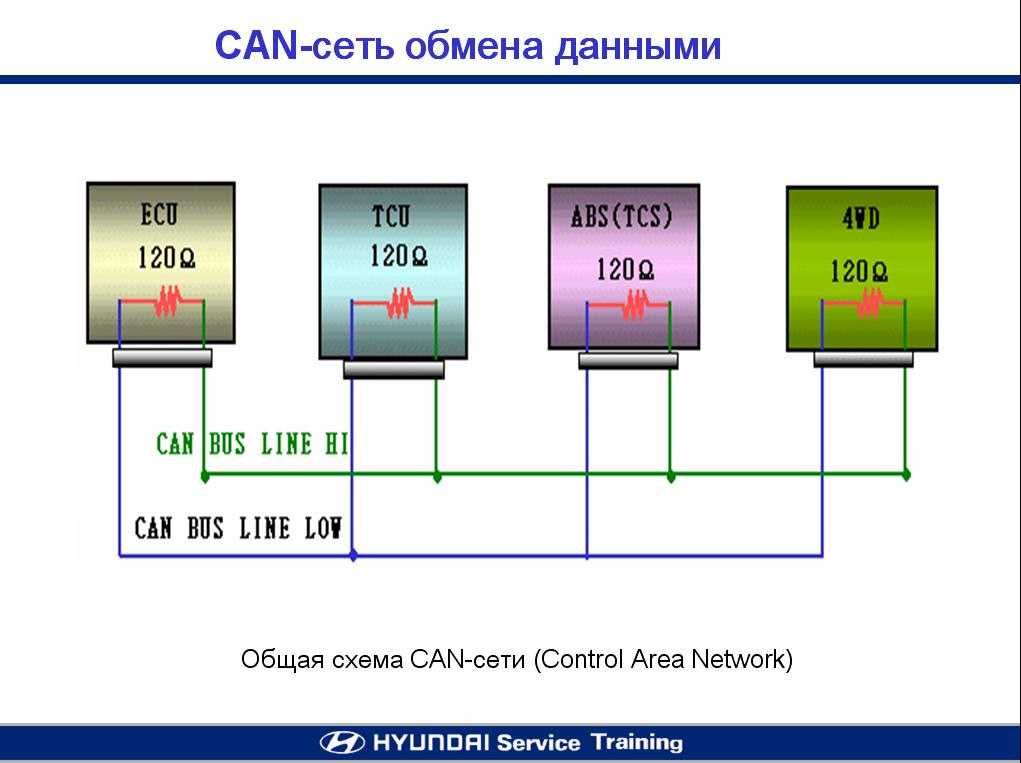
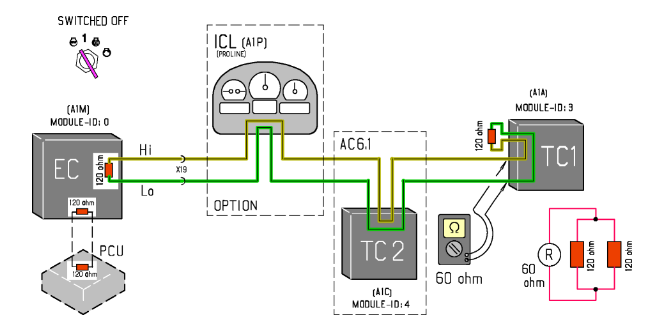
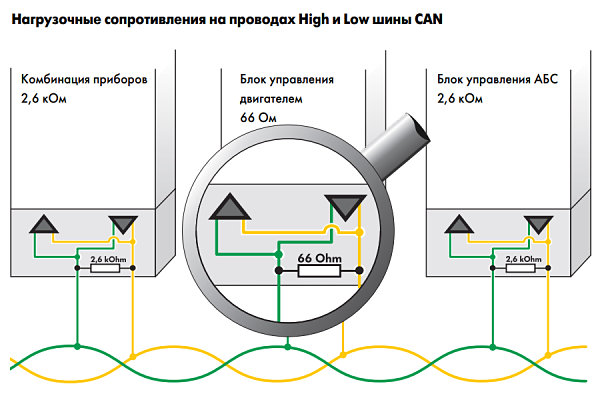
Схема организации обмена данными
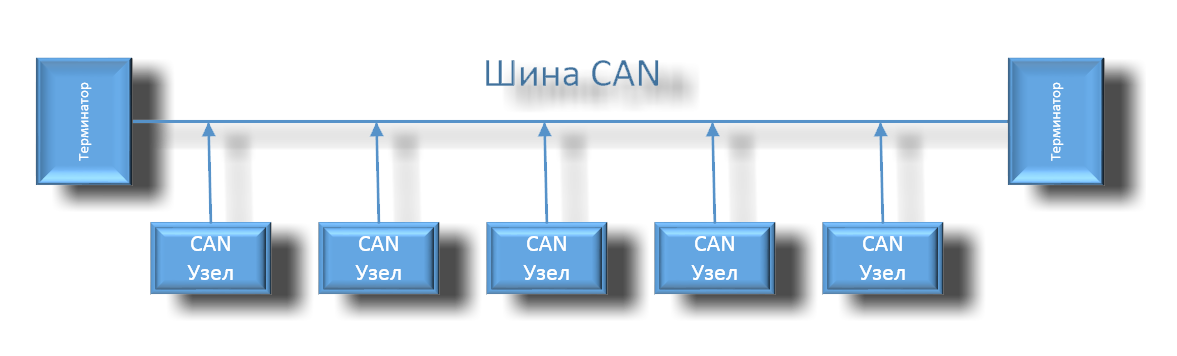
Структурно схему подключения различных блоков автомобиля к CAN-шине можно изобразить в таком виде:
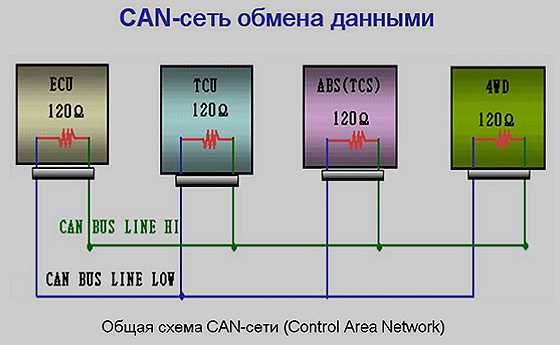
Для согласования всех устройств, то есть организации оптимальных условий и скорости приемо — передачи, выходные сопротивления трансмиттеров должны быть приблизительно одинаковы.
В случае отключения или повреждения каких-либо из блоков управления систем автомобиля, сопротивление шины изменяется, нарушается согласование по сопротивлению, которое приводит к значительному уменьшению скорости передачи информации по шине. Такие нарушения могут привести к полной потере связи по CAN-шине.

![Can bus explained - a simple intro [2023]](https://okz-rybinsk.ru/wp-content/uploads/e/e/1/ee10175d1cc46c83d43b9a3d4076f922.jpeg)

На некоторых автомобилях для устранения проблем с синхронизацией CAN-информации применяется отдельный модуль межсетевого интерфейса.

Каждое сообщение, передаваемое по CAN-шине, имеет собственный идентификатор, например «температура охлаждающей жидкости» и код, соответствующий ее значению, типа «98,7 градусов Цельсия». Не обязательно это будут абсолютные значения, в большинстве случаев это относительные двоичные единицы, которые далее преобразуются в сигналы управления и контроля.
Эти же данные используют средства диагностики для контроля и обработки информации об основных системах автомобиля.
Основные режимы работы CAN-шины:
- активный (зажигание включено);
- спящий (при выключенном зажигании);
- пробуждение и засыпание (при включении и выключении зажигания).
Во время спящего режима ток потребления шины минимальный. Однако при этом по шине (с меньшей частотой) передаются сигналы о состоянии открытия дверей и окон, других систем, связанных с охранными функциями автомобиля.
В большинстве современных диагностических устройств предусмотрен режим диагностирования ошибок по CAN-шине. Технически это организовано непосредственным подключением проводников к диагностическому разъему.
Представьте себе. Мы подключились к этому автомобильному интернету. Что дальше?
Теперь у нас есть уши и голос, однако мы находимся на площади европейского города. Да ещё и иностранцы говорят на разных языках, и злыдни, никак не хотят нас учить своему языку, делая из этого строжайший секрет (например, Форд Мерседесу не друг, а конкурент). Вот и приходится по – одному «брать языка», и для каждой марки и каждой модели выпытывать свой язык общения.
У каждого производителя охранных систем есть свой набор марок и моделей, для которых найден общий язык.
Этот список постоянно расширяется и дополняется.
Резюмируя выше сказанное- наличие в Вашем автомобиле такой шины существенно облегчает установку авто сигнализации и как следствие удешевляет стоимость системы и установки.
Удачи Вам на дорогах и пусть Ваш автомобиль будет под надежной защитой.
Поделитесь, если статья была полезна
Твитнуть
Поделиться
Поделиться
Отправить
Приложения CAN
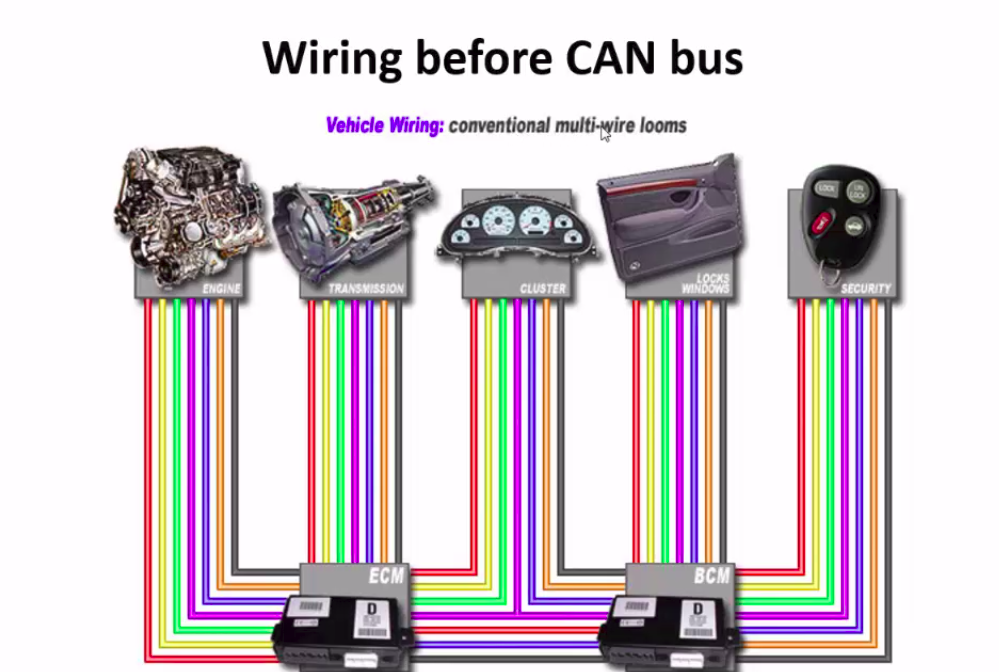
CAN является идеальным решением для любого приложения, где микроконтроллеры обмениваются сообщениями друг с другом и с удаленными периферийными устройствами. Изначально CAN использовался в автомобилях для обеспечения критичного по времени управления и обмена информацией между двигателем и коробкой передач при гарантированном времени ожидания сообщения и допуске каждого из участников сети к работе с текущими данными. Наряду с достаточно дорогими высокоскоростными решениями существуют и экономичные решения для подключения к сети инерционных устройств, которые работают в шкале времени сотен микросекунд (система управления дверьми, подъемник окна, управление зеркалом). При этом мощные жгуты электрических проводов заменяются двухпроводной CAN-сетью, узлами которой являются, в том числе, тормозные огни и указатели поворота.
Широкое применение CAN нашел в промышленной автоматике, где имеется большое число устройств управления, датчиков, механизмов, электроприводов и других объектов, которые связаны единым технологическим циклом (системы отопления и кондиционирования, насосы, конвейеры, лифты, эскалаторы, транспортеры и т. д.)
Важной особенностью таких систем является возможность диагностики и управления объектами, расположенными на большой территории, по адаптивным алгоритмам. В результате достигается существенное уменьшение потребляемой мощности, шума, износа оборудования
Подобная картина наблюдается и в железнодорожных бортовых системах, где решающую роль играет обмен данными между подсистемами при наборе скорости, торможении, управлении дверьми и диагностике.