Принцип работы
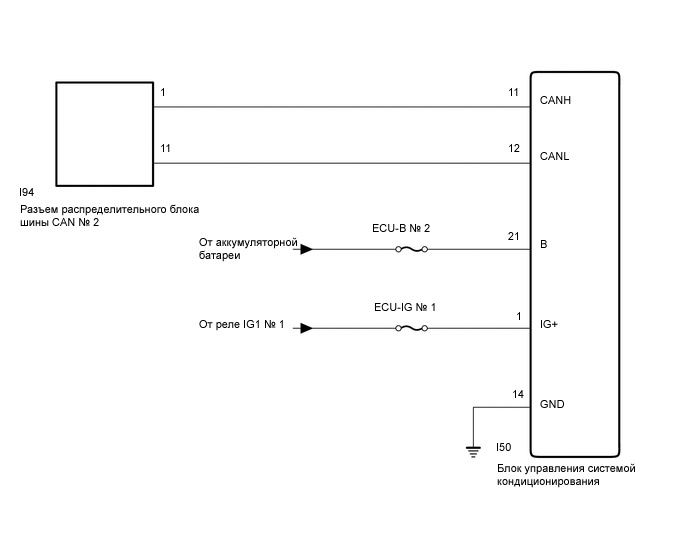
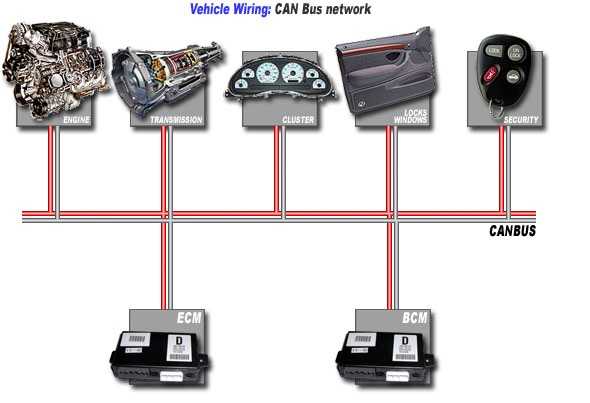
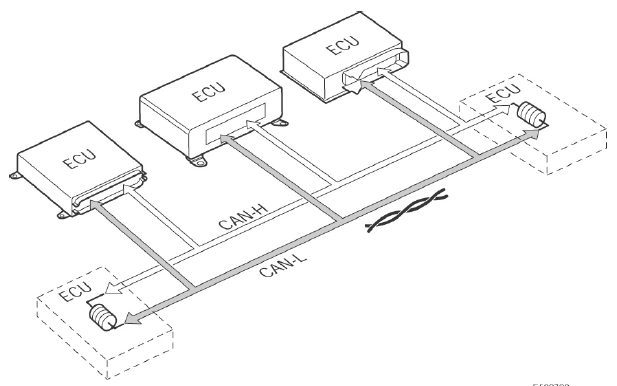
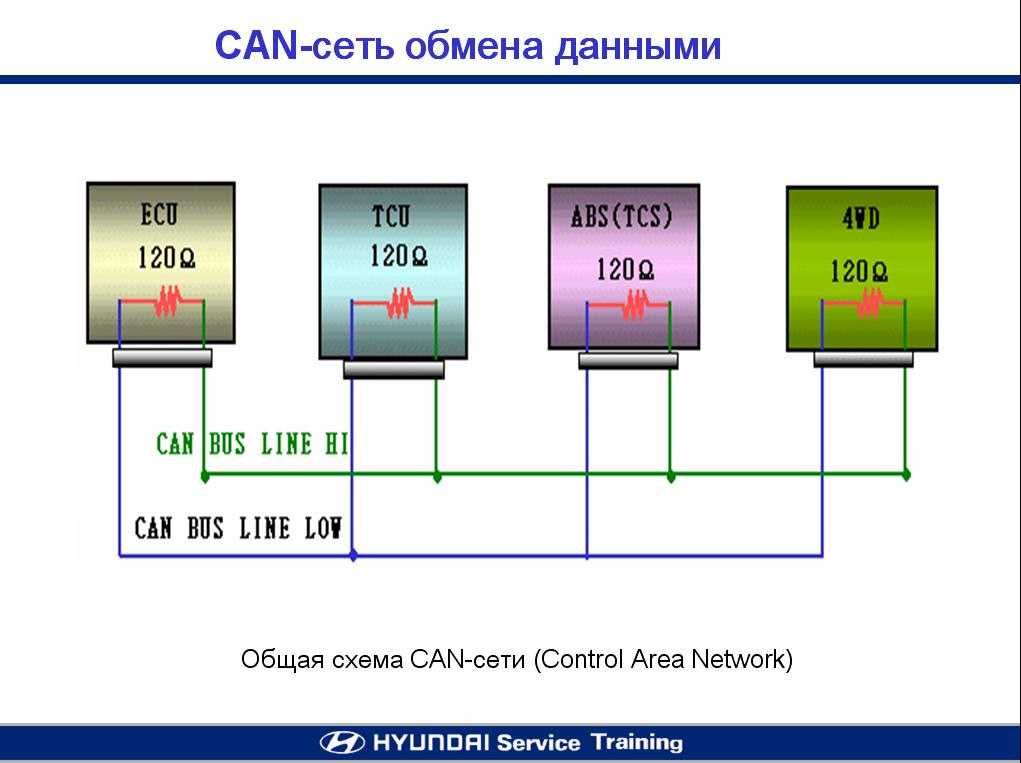
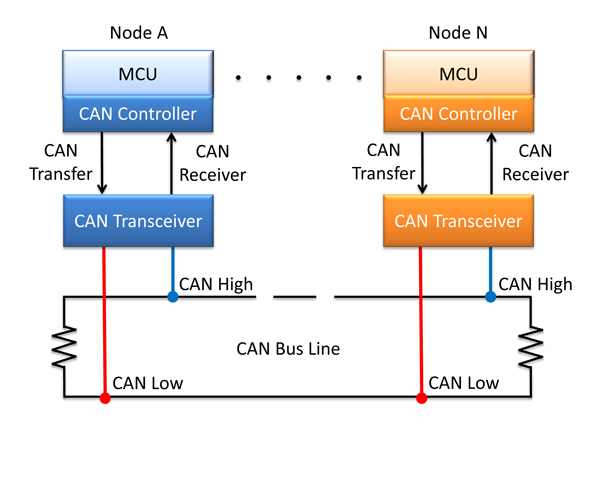
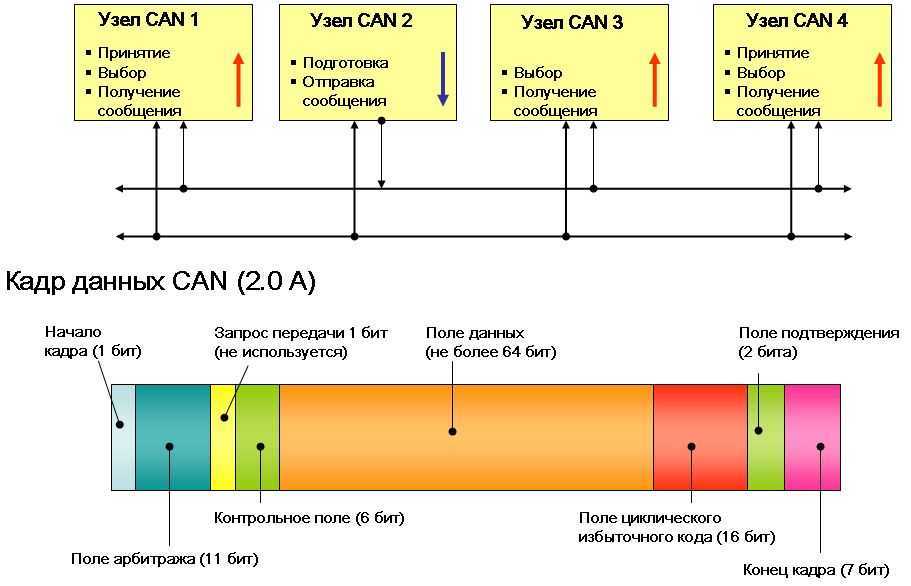
CAN является высокоинтегрированным сетевым интерфейсом передачи данных со скоростью до 1 Мбит/сек. Устройства в CAN-системе соединяются по шине, состоящей из 3-х проводов (2 сигнальных и один общий) (см. рис.).
Сообщения данных, передаваемые из любого узла по CAN-шине, могут содержать от 1 до 8 байт. Каждое сообщение помечено идентификатором, который в сети является уникальным (например: «Нагрев до 240», «Отказ нагрева»,»Бункер загружен», и т.д.). При передаче другие узлы сети получают сообщение и каждый из них проверяет идентификатор. Если сообщение имеет отношение к данному узлу, то оно обрабатывается, в противном случае — игнорируется. CAN-контроллер каждого из устройств может обрабатывать одновременно несколько идентификаторов (например, контроллеры SIEMENS и INTEL могут обрабатывать до 15). Таким образом, в каждом из устройств можно легко организовать несколько «виртуальных» каналов обмена информацией с различными устройствами, включая каналы одновременного получения сообщений.
Рис. 1. Соединение устройств по CAN-шине
Новичку о подключении к CAN шине
Для работы с CAN шиной автомобиля необходимо знать:
CAN шина – это сеть обмена данными определенная в стандарте ISO 11898. Другие каналы обмена данными в автомобиле не могут быть названы CAN шиной. AVC-LAN, BEAN, J1708, VAN и другие старые протоколы это НЕ CAN !
В автомобиле может быть более одной CAN шины. Для каждого функционального сегмента автомобиля выделяется своя сеть CAN. Выделенные сети могут работать на разных скоростях.
Скорости работы CAN шины
CAN на разных автомобилях и в разных сегментах сети может работать на разных скоростях.
Названия сегментов сети: Мотор, Шасси, Комфорт, Салон – условны! У Каждого автопроизводителя свои названия этих участков сети!
- Группа VAG: Мотор\шасси – 500 кбит\с, Комфорт – 100 кбит\с и с 2018 года шина Комфорт может иметь скорость 500 кбит\с., Диагностика: 500 кбит\с.
- BMW: Мотор\Шасси – 500кбит\с, Комфорт – 100 кбит\с и с 2018 года шина Комфорт может иметь скорость 500 кбит\с., Диагностика: 500 кбит\с.
- Mercedes-Benz: Мотор\Шасси – 500 кбит\с, Комфорт 83.333 кбит\с, 250 кбит\с, Диагностика: 500 кбит\с.
- Ford, Mazda: Мотор\Шасси – 500 кбит\с, Комфорт 125 кбит\с. (Для Ford может быть больше вариантов)
- KIA\Hyundai: Мотор\Шасси – 500 кбит\с, Комфорт 125 кбит\с, 500 кбит\с, Мультимедиа: 125 кбит\с, 500 кбит\с., Диагностика: 500 кбит\с.
- GM: Мотор\Шасси – 500 кбит\с, Комфорт: 33.333 кбит\с, 95.2 кбит\с, Диагностика: 500 кбит\с.
- Toyota, Nissan, Honda, Subaru, Suzuki: 500 кбит\с (может использоваться гейтвей! Изучайте сетевую архитектуру автомобиля!)
- Mitsubishi: Мотор\Шасси: 500 кбит\с, Салон\Комфорт – 83.333 кбит\с, 250 кбит\с, Диагностика: 500 кбит\с.
- Volvo: Мотор\Шасси: 500 кбит\с, Салон\Комфорт – 500 кбит\с, 125 кбит\с, Диагностика: 500 кбит\с.
- Renault: 500 кбит\с
- Peugeot: Мотор\Шасси – 500 кбит\с, Комфорт 125 кбит\с.
- Lada: 500 кбит\с
- Коммерческая и специальная техника: Стандарт J1939 250 или 500 кбит\с.
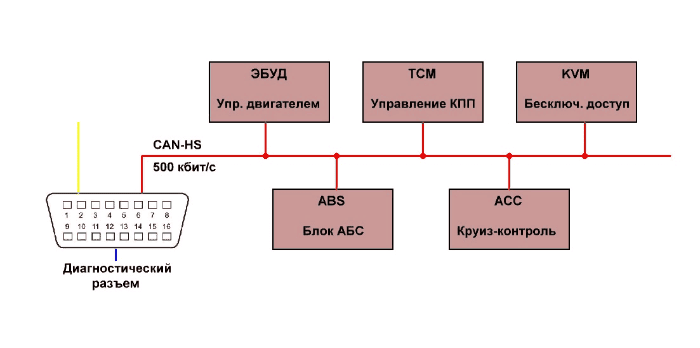
Сегментация CAN шины по функциональному назначению
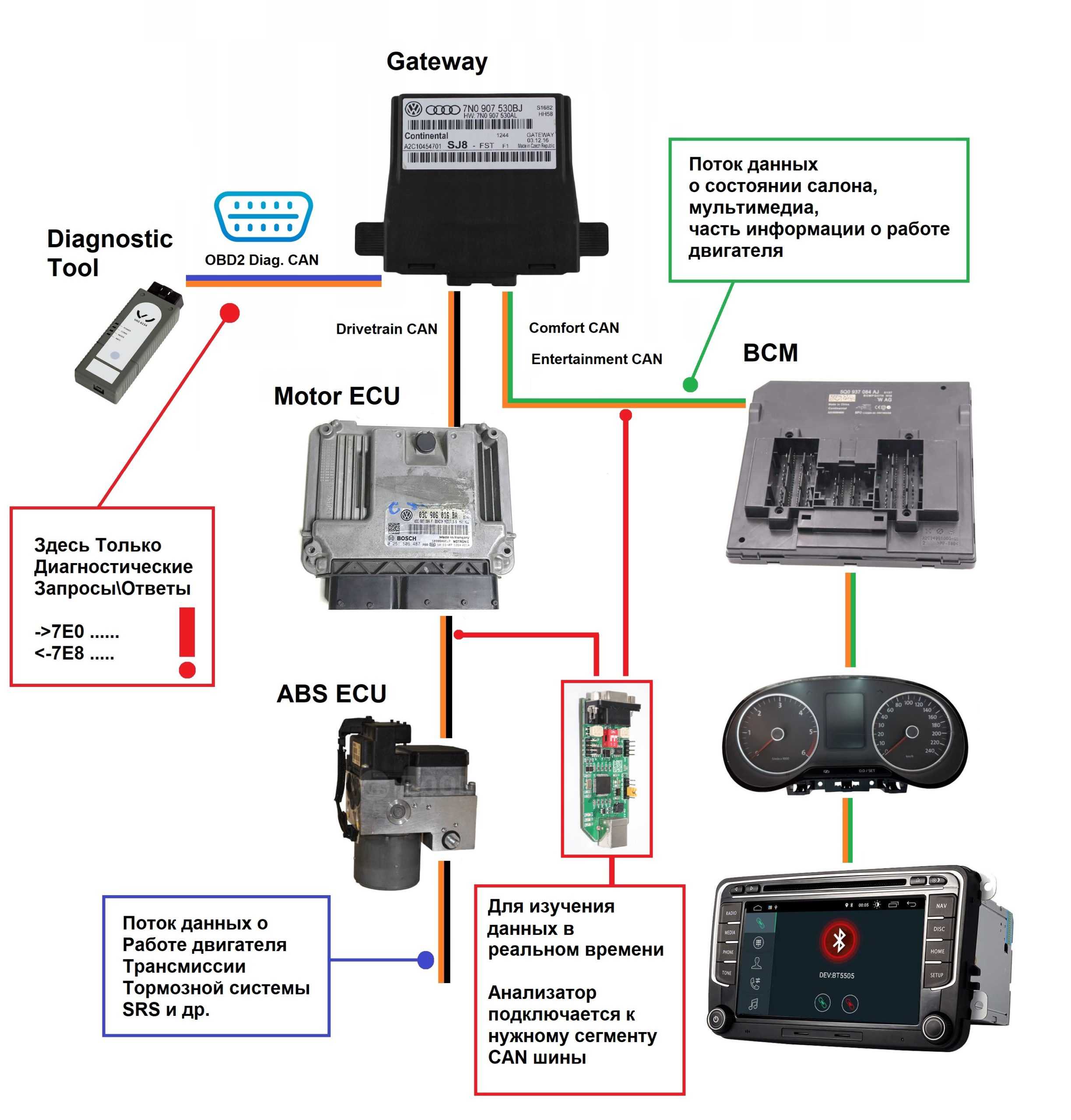
Как правило разные, сегменты сети разделены специальным устройством, которое называется Гейтвей (Gateway, ZGW, ETACS, ICU) . В роли гейтвея может выступать панель приборов (для простых автомобилей) или отдельный специальный модуль межсетевого интерфейса. Гейтвей разделяет потоки данных в разных сегментах сети и обеспечивает связь сегментов сети работающих на разных скоростях
ВАЖНО: На многих современных автомобилях CAN шина в диагностическом разъеме OBD2 отделена от других участков сети при помощи гейтвея (Gateway), поэтому подключившись к CAN шине OBD разъема невозможно увидеть поток данных. В этом случае можно увидеть только обмен между диагностическим инструментом и автомобилем во время процесса диагностики! Так же модулем Gateway оборудованы автомобили японских марок >2016г
в зависимости от модели. Автомобили немецких марок оборудуются таким модулем с момента появления в них CAN шины.
ОБЯЗАТЕЛЬНО изучайте схемы на исследуемый автомобиль, чтобы знать к какому сегменту сети Вы подключаетесь!
Схема ниже изображена в общем виде для упрощения понимания роли Гейтвея. Количество CAN шин и варианты включения блоков управления к тому или другому сегменту сети могут отличаться.
Реализации CAN на уровне электрических сигналов
CAN шина может быть реализована физически тремя способами:
1 ISO11898-2 или CAN-High Speed
Классическая витая пара нагруженная с обоих концов резисторами 120 Ом.В этом случае уровни на шине CAN выглядят так:
Для такой реализации сети используются как правило обычные CAN трансиверы в 8 выводном корпусе, аналоги PCA82C250, TJA1050 и им подобные. Работает такая конфигурация на скоростях 500 кбит\с и выше. (Но могут быть исключения) .
2
ISO11898-3 или CAN-Low Speed или Faut Tolerant CAN
Fault tolerant CAN обычно используется для низкоскоростного обмена между блоками управления относящимися к сегменту сети Салон\Комфорт\Мультимедиа.
ВАЖНО: При подключении к шине Faul tolerant CAN, подключать терминальный резистор 120 Ом между линиями CAN-High и CAN-Low НЕ НУЖНО !
3
Single Wire CAN или SW-CAN
Однопроводный вариант шины CAN. Работает на скорости 33.333 кбит\с
Используется специальный тип трансиверов. Для того что бы подключиться к такому варианту шины CAN необходимо линию CAN-High анализатора подключить к шине SW-CAN а линию CAN-Low к массе\земле.
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Для выполнения задачи потребуется:
- мультиметр;
- канцелярский нож;
- изолента;
- отвертка.
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.
Как установить и подключить сигнализацию к CAN шине?
Наличие данного интерфейса позволяет соединить противоугонный комплекс с «мозгами» автомобиля более быстро. Выполнить эту задачу можно своими руками.
Подготовительные работы
При подготовке надо точно узнать, где находится микропроцессорный модуль управления охранной системой. Если процедура ее монтажа выполнялась в гаражных условиях, то поиск будет несложным. В случае когда установка производилась специалистами, надо уточнить месторасположения устройства.
Пошаговая инструкция
Процесс подключения охранного комплекса к КАН интерфейсу выполняется так:
- Автосигнализация должна быть установлена на машине и соединена со всеми системами и компонентами авто.
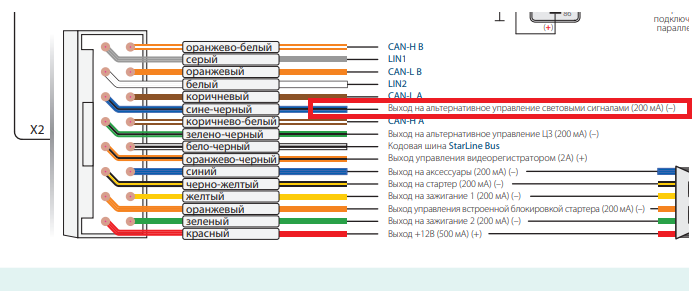
- Надо найти толстый провод с оранжевой окантовкой. Этот проводник соединяется с цифровым интерфейсом.
- Модуль охранного комплекса подключается к указанному контакту. Для этого используется разъем.
- Выполняется установка микропроцессорного блока сигналки в надежном и сухом месте. Устройство закрепляется. Необходимо заизолировать места соединений всех проводников, а также сами кабели, чтобы предотвратить их перетирание и повреждение изоляции. После подключения производится проверка.
- На последнем этапе необходимо произвести настройку всех каналов, чтобы охранный комплекс функционировал без перебоев. Процедура регулировки параметров выполняется с помощью сервисного руководства, которое входит в комплектацию сигналки.
Пользователь sigmax69 в ролике показал, как выполняется процедура подключения противоугонного комплекса с помощью КАН модуля на примере автомобиля Хендай Солярис.
Что такое 2CAN 2LIN?
Предлагаем поэтапно разобрать самые важные моменты.
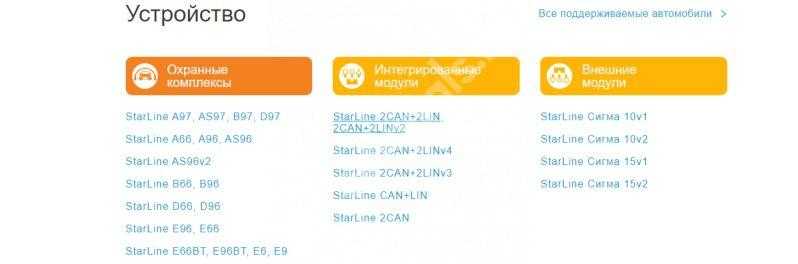
1. Что это за комплектация такая, 2CAN 2LIN
Каждая модель сигнализации Старлайн имеет несколько вариаций, различающихся между собой наличием дополнительных модулей. Например, у Старлайн а93, есть версии ECO, GSM, CAN+ LIN, а также 2CAN+ 2LIN.

ECO – самая простая модификация, с минимальным набором базовых функций. GSM оснащена встроенным модулем для SIM карты. Если на упаковке охранной системы есть обозначение CAN+ LIN или 2CAN+ 2LIN, значит в ее комплектацию входит дополнительный блок для подключения через цифровой кабель.




Список машин, которые поддерживают модуль 2CAN 2LIN, можно посмотреть тут:
2. Что такое CAN LIN шины?
Итак, теперь вы знаете, что 2can 2lin в сигнализциях Starline – это, по сути, такой способ подключения. Рассмотрим, что он из себя представляет.
CAN – расшифровывается, как Controller Area Network. Из перевода выходит, это некая цифровая сеть из датчиков, контроллеров и исполнительных устройств. Связь между ними обеспечивает КАН шина (кабель), по которой и происходит общение между разными электронными блоками
CAN шиной сегодня оборудованы все новые тачки. Она связывает электронные модули автомобиля, обеспечивая между ними качественное и непрерывное взаимодействие. LIN шина — тоже цифровая магистраль, только однопроводная. Это такая упрощенная вариация КАН кабеля. Блок 2CAN 2LIN в сигнализациях Старлайн позволяет подключиться к этим сетям, то есть стать их полноправной электронной единицей.
Что такое КАН и LIN шины в сигнализации Старлайн, надеемся, вы поняли. Все электронные компоненты, подключенные к этим магистралям, могут связываться друг с другом. Общение в цифровой сети осуществляется через кодированные сообщения. У каждого контроллера свой идентификатор, благодаря которому система и понимает, откуда поступает информация.
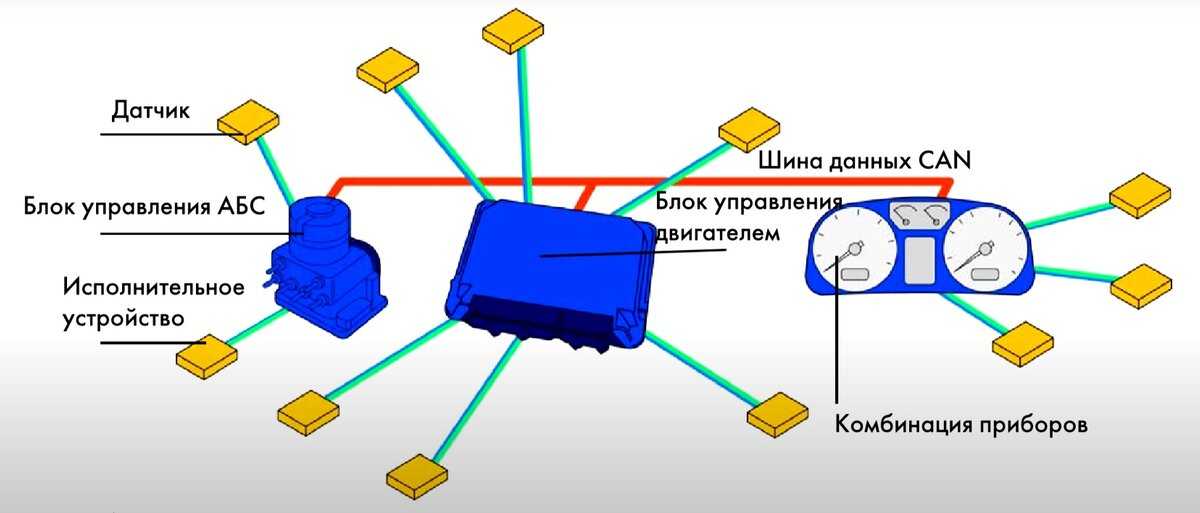
В автомобиле по CAN LIN проводам «общаются» электронный блок управления, комбинация приборов, модуль двери водителя, центральный блок кузовной электроники, ABS, климатическая система, а также котроллер подушек безопасности. Получается, сигнализации Старлайн с модулем CAN LIN могут управлять многими штатными датчиками и устройствами автомобиля, а также считывать с них нужную информацию. Например, регулировать работу стеклоподъемников, зеркал, подушек безопасности, контролировать, открыта ли дверь или капот.
Вот для чего нужен модуль 2can 2lin Starline.
3. Зачем это нужно?
Устаревшая альтернатива цифровому подключению – аналоговое. Это значит, каждая функция сигнализации Старлайн подключается к исполнительному компоненту отдельным проводом. Таким образом, полный монтаж охранного комплекта аналоговым способом требует от 10 до 20 точек врезки в центральную проводку авто!

Цифровой же способ подключения по CAN LIN дает возможность подсоединиться ко всем электронным устройствам автомобиля через всего 2 провода (витая пара CAN-H и CAN-L). Чувствуете разницу?
Расшифровка кодов
Что же, если произвести проверку авто на предмет неисправностей у вас получилось, то тогда необходимо расшифровать комбинации ошибок, иначе зачем вообще нужна диагностика?
Самостоятельная диагностика
Рассмотрим расшифровку комбинаций неисправностей, которые вы можете считать при самостоятельной проверке Лады Приоры.
Обратите внимание: если кнопка переключения функций бортового компьютера не будет нажиматься более 10 секунд, то приборная панель вновь перейдет в рабочее состояние
Поломки в системе зажигания
Если вы не смогли провести проверку своей ВАЗ Приора самостоятельно, то можно сделать это при помощи специального тестера. В этом случае код ошибки будет представлять собой комбинацию из буквы и четырех цифр:
- Р — означает поломку в работе электронных систем ДВС;
- С — неисправности в работе шасси;
- В — поломка в электронике салона авто;
- U — свидетельствует об ошибке в совместной работе разных систем;
- цифра 0 обозначает код OBD-2;
- 1 и 2 — код предприятия;
- 3 — резервный код.
| Комбинация | Описание поломки |
| Р0300 | Блок управления передает сигнал об отсутствии искры во всех цилиндрах двигателя 16 клапанов авто. |
| Р0326 | Некорректный сигнал, поступающий на блок управления с датчика детонации. Рекомендуется произвести более тщательную проверку устройства. |
| Р0327 | В цепи датчика детонации произошел обрыв или замыкание. Следует проверить цепь. |
| Р0335, Р0336 | Возникли ошибки в работе датчика коленчатого вала. Кроме того, такие комбинации могут свидетельствовать о некорректном сигнале, поступающем с устройства на бортовой компьютер. |
| Р0337 | Устройство контроля положения коленчатого вала замыкает на массу. |
| Р0338 | Произошло короткое замыкание или обрыв в цепи датчика коленвала. |
| Р0342 | В цепи датчика фар зафиксирован слишком низкий сигнал |
| Р0343 | Зафиксирован слишком высокий сигнал в цепи того же устройства. |
| Р0422 | Произошла поломка нейтрализатора, рекомендуется заменить устройство. |
| Р0444 | Блоком управления Лада Приора зафиксирован обрыв в проводке клапана адсорбера. |
| Р0445 | Клапан адсорбера закоротил на массу. |
| Р0480 | Произошел обрыв в проводке реле вентилятора, следует произвести проверку реле и при необходимости заменить его. |
| Р0481 | В проводке вентилятора системы охлаждения произошло замыкание. |
После принятия ресивером согласия он изначально проведет инсталляцию со спутника, а затем, после достижения 50 -й отметки на шкале прогресса, начнет инсталлировать скачанные файлы в память устройства.
| Комбинация | Описание поломки |
| Р0300 | Блок управления передает сигнал об отсутствии искры во всех цилиндрах двигателя 16 клапанов авто. |
| Р0326 | Некорректный сигнал, поступающий на блок управления с датчика детонации. Рекомендуется произвести более тщательную проверку устройства. |
| Р0327 | В цепи датчика детонации произошел обрыв или замыкание. Следует проверить цепь. |
| Р0335, Р0336 | Возникли ошибки в работе датчика коленчатого вала. Кроме того, такие комбинации могут свидетельствовать о некорректном сигнале, поступающем с устройства на бортовой компьютер. |
| Р0337 | Устройство контроля положения коленчатого вала замыкает на массу. |
| Р0338 | Произошло короткое замыкание или обрыв в цепи датчика коленвала. |
| Р0342 | В цепи датчика фар зафиксирован слишком низкий сигнал |
| Р0343 | Зафиксирован слишком высокий сигнал в цепи того же устройства. |
| Р0422 | Произошла поломка нейтрализатора, рекомендуется заменить устройство. |
| Р0444 | Блоком управления Лада Приора зафиксирован обрыв в проводке клапана адсорбера. |
| Р0445 | Клапан адсорбера закоротил на массу. |
| Р0480 | Произошел обрыв в проводке реле вентилятора, следует произвести проверку реле и при необходимости заменить его. |
| Р0481 | В проводке вентилятора системы охлаждения произошло замыкание. |
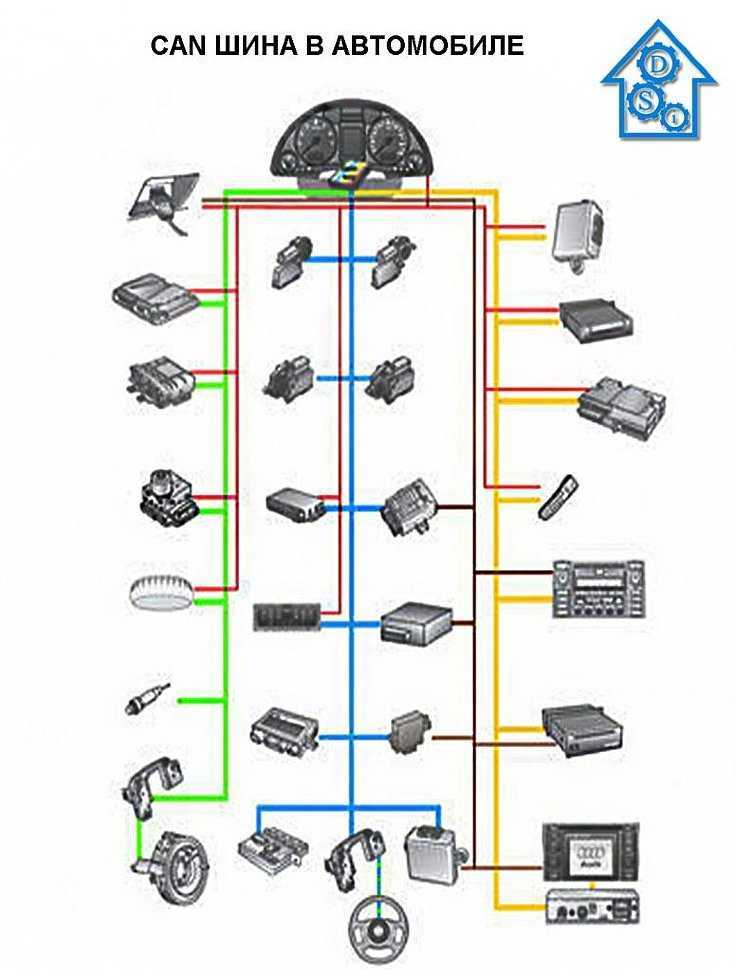
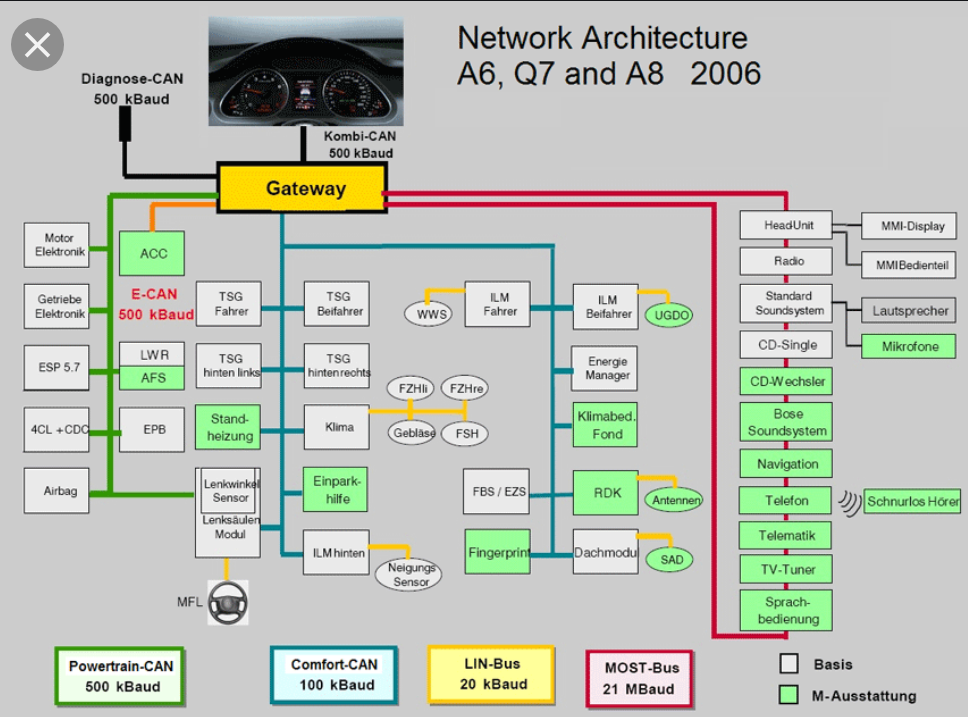
Разновидность функций шин
Рассмотрим, какие существуют функции у различных девайсов.
Девайс для автомобильного двигателя
При соединении устройства обеспечивается быстрый канал передачи данных, по которому информация распространяется со скоростью 500 кбит/с. Основное предназначение шины заключается в синхронизации работы управляющего модуля, к примеру, коробки передач и мотора.
Устройство типа Комфорт
Скорость передачи данных по этому каналу более низкая и составляет 100 кбит/с. Функция такой шины заключается в соединении всех устройств, относящихся к данному классу.
Информационно-командный девайс
Скорость передачи данных такая же, как и в случае с устройствами типа Комфорт. Главная задача шины заключается в обеспечении связи между обслуживающимися узлами, к примеру, мобильным девайсом и системой навигации.
Шины от разных производителей приведены на фото.
Преимущества и недостатки
Если автомобиль оснащен цифровым интерфейсом, это обеспечивает следующие плюсы:
- Простота монтажа сигнализации на транспортное средство. Наличие CAN-шины в авто позволяет обеспечить более быстрый и упрощенный алгоритм подключения охранной системы.
- Высокая скорость отправки информации между агрегатами и системами, что обеспечивает быстродействие узлов.
- Хорошая устойчивость к воздействию помех.
- Все цифровые интерфейсы имеют многоуровневую систему контроля. Благодаря этому можно не допустить образования ошибок при отправке и приеме информации.
- Цифровой интерфейс, работая в активном режиме, выполняет разброс скорости по различным каналам самостоятельно. Благодаря этому все системы работают максимально оперативно.
- Безопасность CAN-шины. При попытке получения несанкционированного доступа к автомобилю система может произвести блокировку узлов и агрегатов.
Минусы:
- Некоторые системы обладают ограничениями по объему передающейся информации. Если автомобиль сравнительно новый и оборудован разными электронными устройствами, это приводит к росту нагрузки на канал передачи данных. В результате время отклика увеличивается.
- Большинство передающейся информации по цифровому интерфейсу имеет определенное назначение. На полезные данные в системе предусмотрена небольшая часть трафика.
- Возможна проблема отсутствия стандартизации. Это часто происходит при применении протоколов высших уровней.
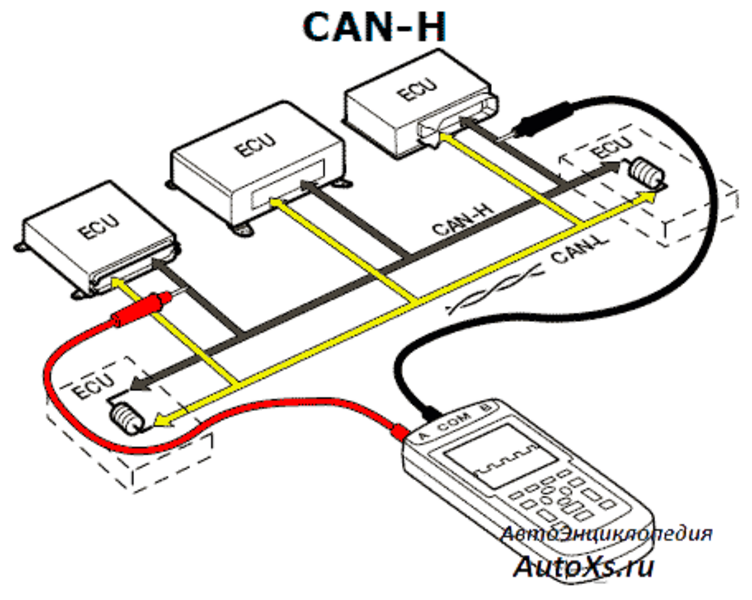
Как передается информация
Итак, CAN-шина представляет собой сеть, по которой происходит обмен информацией между устройствами. Возьмем для примера блок управления двигателем – он имеет не только основной микроконтроллер, но и CAN-устройство, которое формирует и рассылает импульсы по шинам H (CAN-высокий) и L (CAN-низкий), которые называются витая пара.
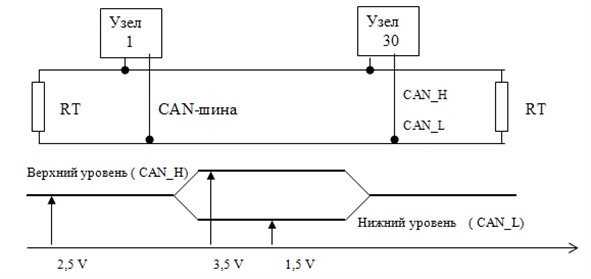
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN.
Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов.
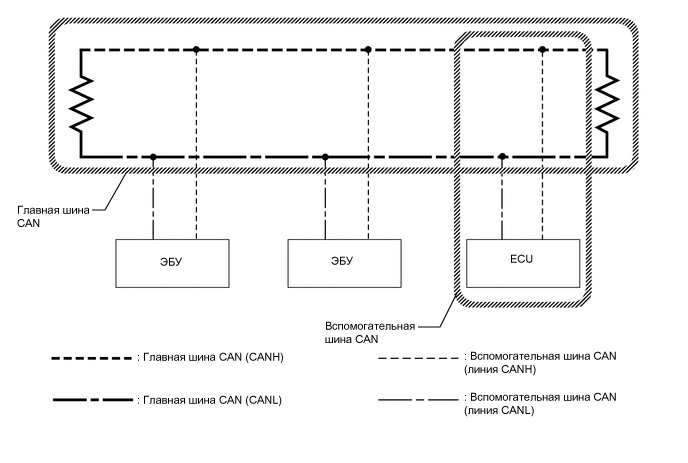
Рис. 2. Фрагмент CAN-шины с распределением нагрузки в проводах: CAN High CAN Low
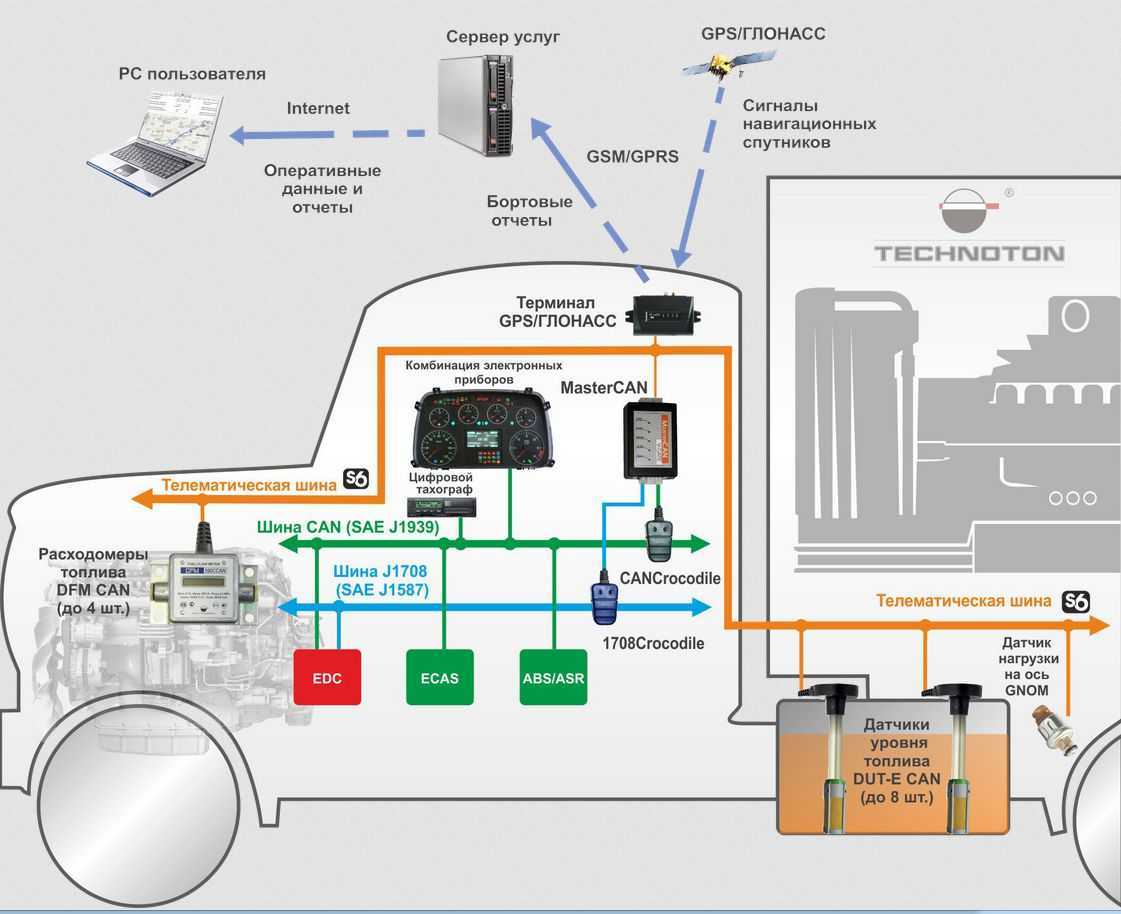
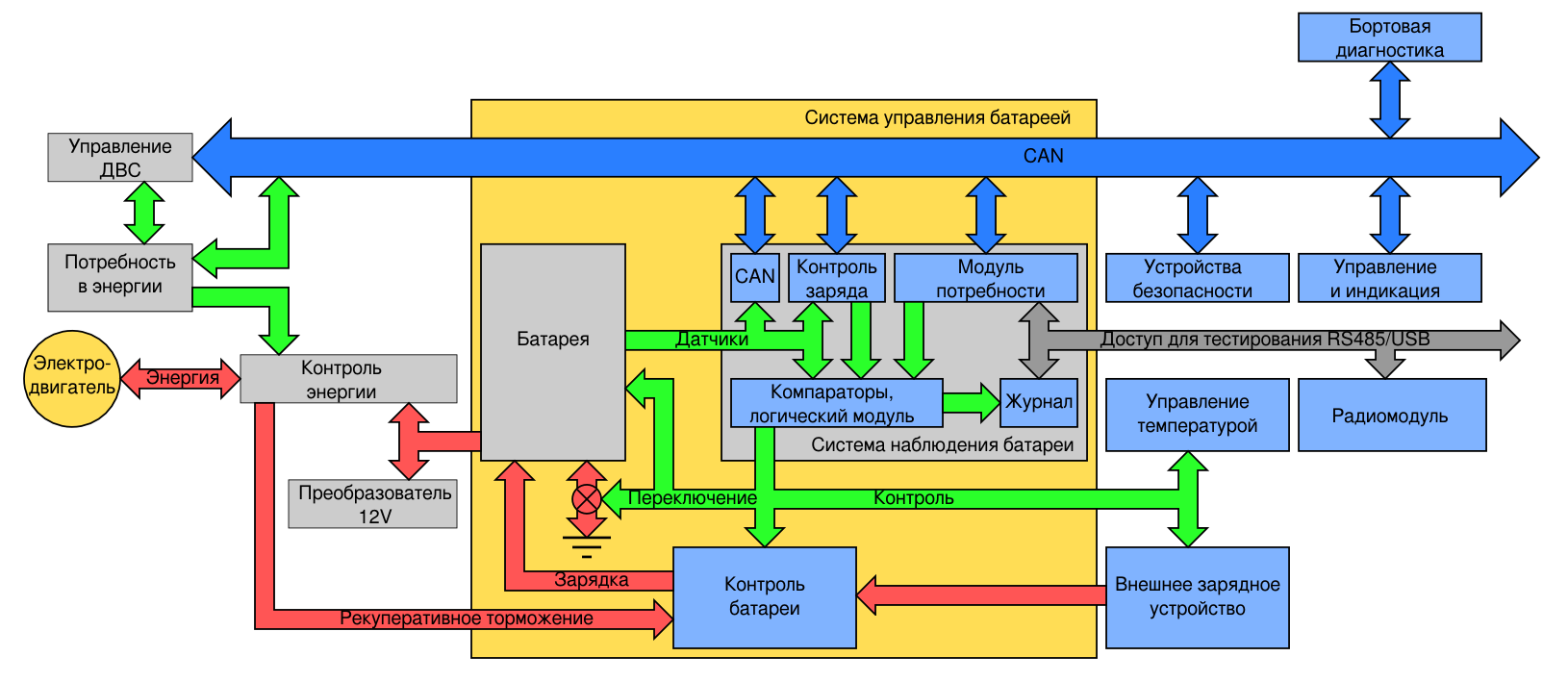
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.Для решения данной технической проблемы используется преобразователь для связи между шинами.Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Рис. 3. Блок-схема межсетевого интерфейса
Недостатки сигнализации с CAN шиной
Минусы, характерные для этих устройств:
- Наличие ограничений в плане объема передающейся информации. Современные транспортные средства оснащены множеством электронных приборов и устройств. В результате роста их числа увеличивается нагрузка канала, по которому передаются данные. Это приводит к росту времени отклика.
- Большинство информации, которая передается через интерфейс, имеет определенное назначение. На полезные данные в шине отводится только небольшая часть перенаправляющегося трафика.
- Возможны проблемы в плане отсутствия стандартизации. Это обусловлено использованием протокола высшего уровня.
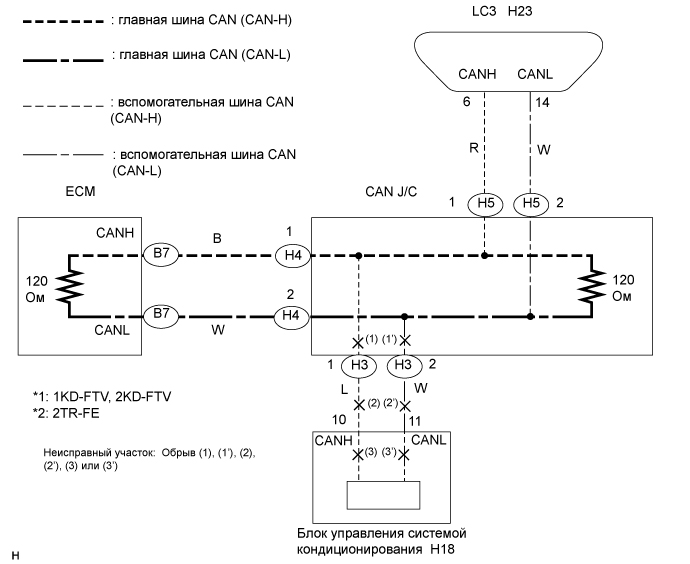
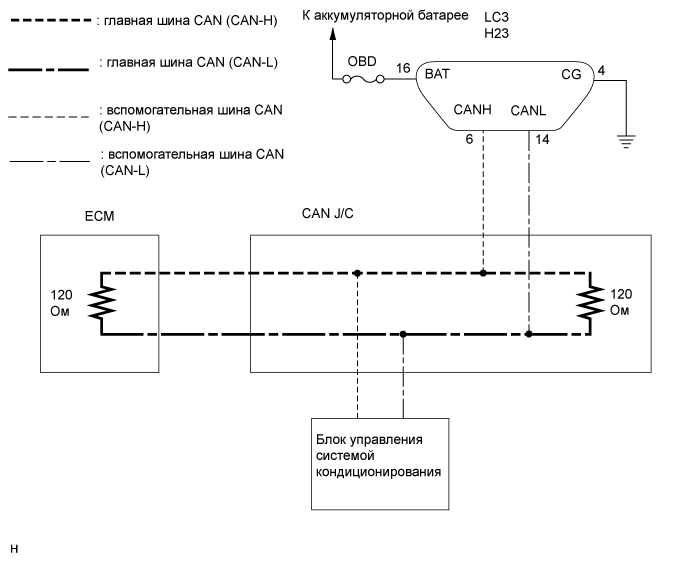
Шина CAN не работает
Если шина передачи данных K-CAN или PT-CAN не работает, то, возможно, имеется КЗ или обрыв провода CAN высокого или низкого уровней. Или неисправен ЭБУ.



- По очереди отсоединять абонентов шины CAN до тех пор, пока не будет найден блок, являющийся причиной неисправности (= ЭБУ X).
- Проверить провода к ЭБУ X на отсутствие КЗ или обрыва.
- При возможности проверить ЭБУ X.
- Такая последовательность действий приводит к успеху только в том случае, если короткое замыкание имеет проверяемый провод от ЭБУ к шине CAN. Если провод в шине CAN сам имеет короткое замыкание, то нужно проверить жгут проводов.
Оставляем за собой право на опечатки, смысловые ошибки и технические изменения.
Часто основной причиной неисправности в электронной системе управления транспортным средством — являются механические повреждения шины CAN или выход из строя блоков управления, висящих на шине CAN.
Ниже в статье приведены способы диагностики шины CAN при различных неисправностях. В качестве примера показана типичная схема CAN шины на тракторе Valtra T » серии.
Условные обозначения:
-
ICL
— Instrumental Cluster (Панель приборов) -
TC1/TC2
— Transmission controller (Блок управления трансмиссией 1/2) -
EC
— Electronic controller (Блок управления двигателем) -
PCU
— Pump Control Unit (Блок управления топливным насосом)
Измерения шины CAN BUS
Оконечные резисторы 120 Ом (Иногда эти резисторы называют терминаторы) внутри блока управления EC и резистор, расположенный рядом с блоком TC1
Если на дисплее (на боковой стойке) отображается код неисправности, имеющий отношение к шине CAN, то это означает неисправность проводки шины CAN или блока управления.
Система может автоматически сообщить, какой из блоков управления не может получать информацию (мониторы блоков управления передают информацию друг другу).
Если дисплей мигает или сообщение шины CAN не может быть передано через шину, то для обнаружения места повреждения проводки шины CAN (или неисправного блока управления) можно использовать мультиметр.
Шина CAN не имеет физических повреждений
Если сопротивление между проводами Hi (Высокое) и Lo (Низкое) шины CAN (в любой точке) примерно равно 60 Ом,
то шина CAN не имеет физических повреждений.
— Блоки управления EC и TC1 исправны, так как оконечные резисторы (120 Ом) расположены в блоке EC и рядом с блоком TC1.
Блок управления TC2 и приборная панель ICL также не повреждены, поскольку шина CAN проходит через эти блоки.
Шина CAN повреждена
Если сопротивление между проводами Hi и Lo шины CAN (в любой точке) примерно равно 120 Ом, то проводка шины CAN повреждена (один или оба провода).
Шина CAN имеет физические повреждения
Если шина CAN повреждена, следует определить место повреждения.
Сначала замеряется сопротивление провода CAN-Lo, например, между блоками управления EC и TC2.
Таким образом, измерения должны быть выполнены между разъемами Lo-Lo или Hi-Hi. Если сопротивление примерно равно 0 Ом, то провод между измеряемыми точками не поврежден.
Если сопротивление примерно равно 240 Ом, то между измеряемыми точками шина повреждена. На рисунке показано повреждение провода CAN-Lo между блоком управления TC1 и приборной панелью ICL.
Короткое замыкание в шине CAN
Если сопротивление между проводами CAN-Hi и CAN-Lo примерно равно 0 Ом, то в шине CAN произошло короткое замыкание.
Отсоедините один из блоков управления и измерьте сопротивление между контактами разъемов CAN-Hi и CAN-Lo на блоке управления. Если устройство исправно, установите его на место.
Затем отсоедините следующее устройство, выполните измерения. Действуйте таким образом до тех пор, пока не будет обнаружено неисправное устройство. Блок неисправен, если сопротивление примерно равно 0 Ом.
Если все блоки проверены, а измерения по-прежнему сигнализируют о коротком замыкании, это означает неисправность проводки шины CAN. Чтобы найти место повреждения проводов, их следует проверить визуально.
Измерение напряжения шины CAN
Включите питание и измерьте напряжение между проводами CAN-Hi, CAN-Lo и проводом заземления.
Напряжение должно находиться в диапазоне 2,4 — 2,7 В.
Чтобы связно и гармонично управлять системами, обеспечить качество и функциональность передачи данных, многие автомобилестроительные компании применяют современную систему, известную как CAN-шина. Принцип ее организации заслуживает подробного рассмотрения.
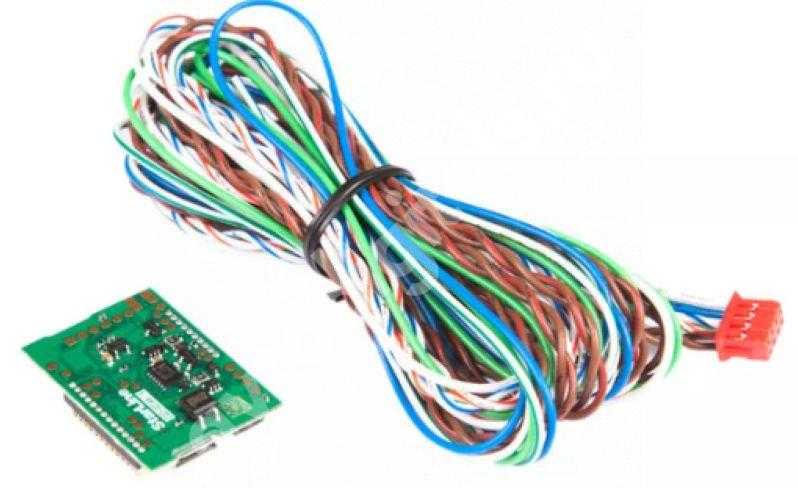
Ножевой микроразъем SmartWeb
На контроллерах SmartWeb обычно нет клемм для подключения CAN-проводов, вместо них там парный ножевой микроразъем.
Поэтому, в комплекте с каждым контроллером SmartWeb идет небольшой кусок провода, обжатого таким микроразъемом с одной стороны и свободными концами с другой стороны.
Для соединения контроллеров используйте следующую схему:
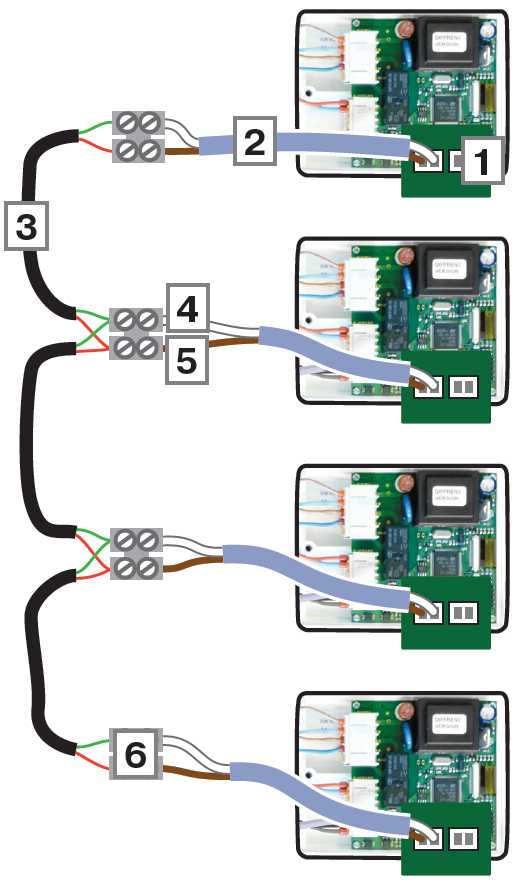
- Ножевой микроразъем для CAN (2шт)
- Провод CAN (в комплекте)
- Витая пара
- Белый — CAN H
- Коричневый — CAN L
- Винтовые или пружинные клеммы
Кроме того, желательно найти на контроллере слаботочный минус (GND) и объединить этот минус с другими контроллерами сети CAN, отдельным проводом.
Как сделать анализатор своими руками?
Самостоятельно выполнить сборку данного устройства сможет только профессионал в области электроники и электротехники.
Основные нюансы процедуры:
- В соответствии со схемой на первом фото в галерее надо приобрести все элементы для разработки анализатора. На ней подписаны составляющие детали. Потребуется плата с контроллером STM32F103С8Т6. Понадобится электросхема стабилизированного регуляторного устройства и КАН трансивер МСР2551.
- При необходимости в анализатор добавляется блютуз-модуль. Это позволит при эксплуатации девайса записать основную информацию на мобильное устройство.
- Процедура программирования выполняется с использованием любой утилиты. Рекомендуется применение программ КАНХакер или Ардуино. Первый вариант более функциональный и имеет опцию фильтрации пакетных данных.
- Для осуществления прошивки потребуется преобразовательное устройство USB-TTL, оно понадобится для отладки. Простой вариант — применение ST-Link второй версии.
- Загрузив программу на компьютер, основной файл формата ЕХЕ необходимо прошить в контроллер с использованием программатора. После выполнения задачи ставится перемычка бутлоудера, а изготовленное устройство подключается к ПК через USB-выход.
- Заливать прошивку в анализатор можно с использованием программного обеспечения MPHIDFlash.
- Когда обновление ПО будет завершено, надо отсоединить провод и демонтировать перемычку. Производится установка драйверов. Если устройство собрано верно, то на компьютере оно будет определяться как COM-порт, это можно посмотреть в диспетчере задач.
Защита от угона
Модуль iCAN устанавливается в каком угодно узле, где расположены жгуты, в месте установки шины. Из-за минимальных габаритов и особого алгоритма действий выявить блокировку обычными методами при совершении угона практически нереально.

Внешне этот модуль маскируется под разные контролирующие датчики, что также делает невозможным его обнаружение. При желании возможно настроить работу прибора для автоматической защиты им стекол автомобиля, зеркал.
При наличии у транспортного средства автозапуска двигателя, iCAN не помешает его работе, так как срабатывает при старте движения.
Ознакомившись с устройством и принципами обмена данными, которой наделена CAN-шина, становится понятным, почему все современные автомобили применяют эти технологии при разработке управления транспортным средством.
Представленная технология по своему устройству довольно сложна. Однако все заложенные в нее функции обеспечат максимально эффенктивное, безопасное и комфортное управление автомобилем.
Существующие разработки помогут обеспечить защиту транспортного средства даже от угона. Благодаря этому, а также комплексу других фунций, шина-CAN популярна и востребована.
Третья нормальная форма
Третья нормальная форма относится ко всем таблицам задачи в комплексе. Анализируемые таблицы не должны содержать избыточную информацию в не ключевых полях. Все таблицы должны быть связаны между совой по принципу «один ко многим»
- Таблицы должны соответствовать второй нормальной форме.
- В зависимой таблице внешний ключ должен быть not null.
- Все поля стремятся быть not null
- Избавиться от избыточной информации, содержащейся в не ключевых столбцах. Другими словами не ключевая информация должна храниться только в одной таблице в одном поле
Если содержимое группы полей может относиться более чем к одной записи в таблице, подумайте о том, не поместить ли эти поля в отдельную таблицу.
Связь между таблицами «один к одному»
В связи «один к одному» строке таблицы А может сопоставляться только одна строка таблицы Б и наоборот. Связь «один к одному» создается, если для обоих связанных ключей определены ограничения первичного ключа и уникальности.
Этот тип связи обычно не используется, так как большую часть связанных таким образом данных можно хранить в одной таблице. Связь «один к одному» можно использовать для следующих целей:
- Изоляция части таблицы из соображений безопасности.
- Хранение кратковременных данных, которые можно легко удалить вместе со всей таблицей.
- Хранения данных, которые относятся только к части основной таблицы.
Само по себе использование связи один к одному есть нарушение требований к третьей нормальной форме и может применяться как средство осознанной денормализации для решения задач оптимизации технических проблем.