
Какие инструменты нужны для проверки сопротивления CAN-сети?
Для проверки сопротивления CAN-сети потребуется следующий набор инструментов:
- Мультиметр: основной инструмент для измерения сопротивления. Мультиметр должен иметь функцию измерения сопротивления и возможность работы с CAN-шиной.
- Испытательные провода: необходимы для подключения мультиметра к CAN-шине. Провода должны быть достаточной длины и иметь соответствующие разъемы для подключения к мультиметру и CAN-шине.
- Схема подключения: для успешной проверки сопротивления CAN-сети необходимо иметь схему подключения, которая показывает, как правильно подключить мультиметр к CAN-шине.
- Ключ для управления питанием: для проведения проверки сопротивления необходимо отключить питание от CAN-сети. Для этого может понадобиться ключ или другой инструмент для управления питанием.
При использовании указанных инструментов и следуя схеме подключения можно провести проверку сопротивления CAN-сети и определить, есть ли повреждения или проблемы со сопротивлением в сети.
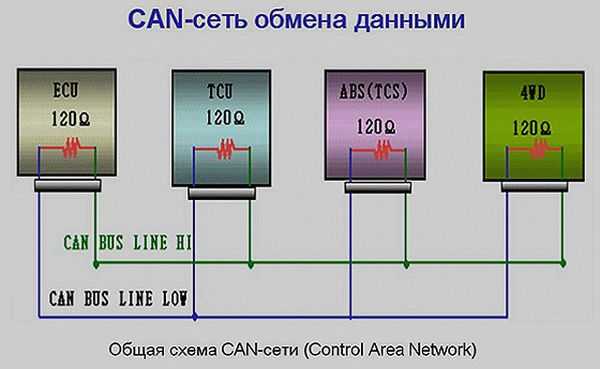
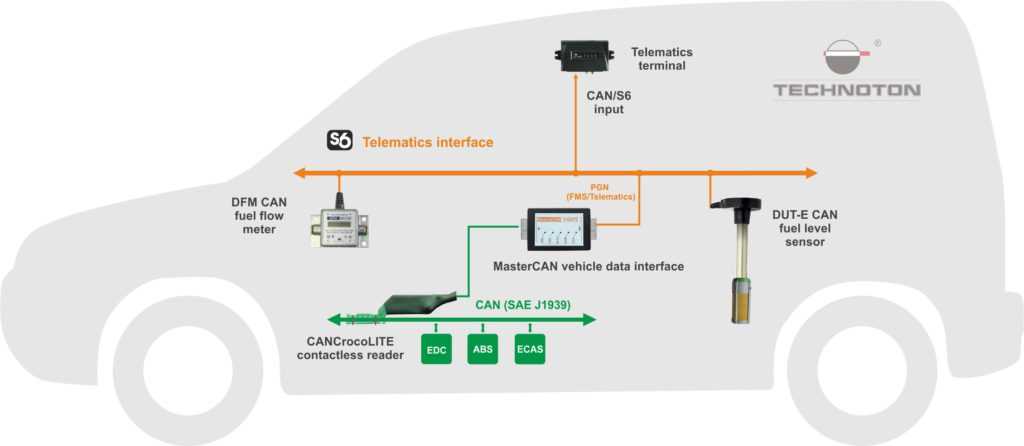
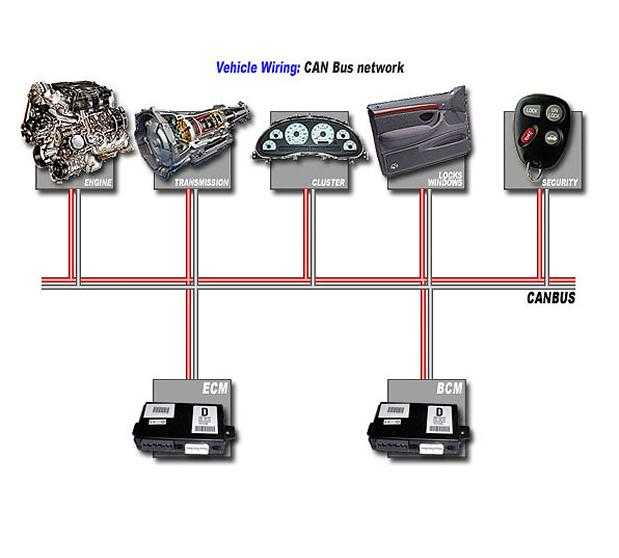
Схема организации обмена данными
p, blockquote 18,0,0,0,0 —>
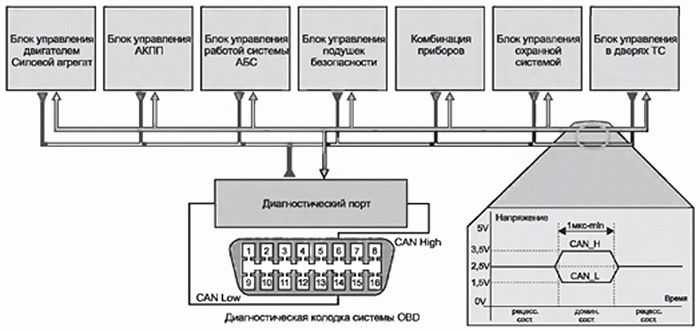
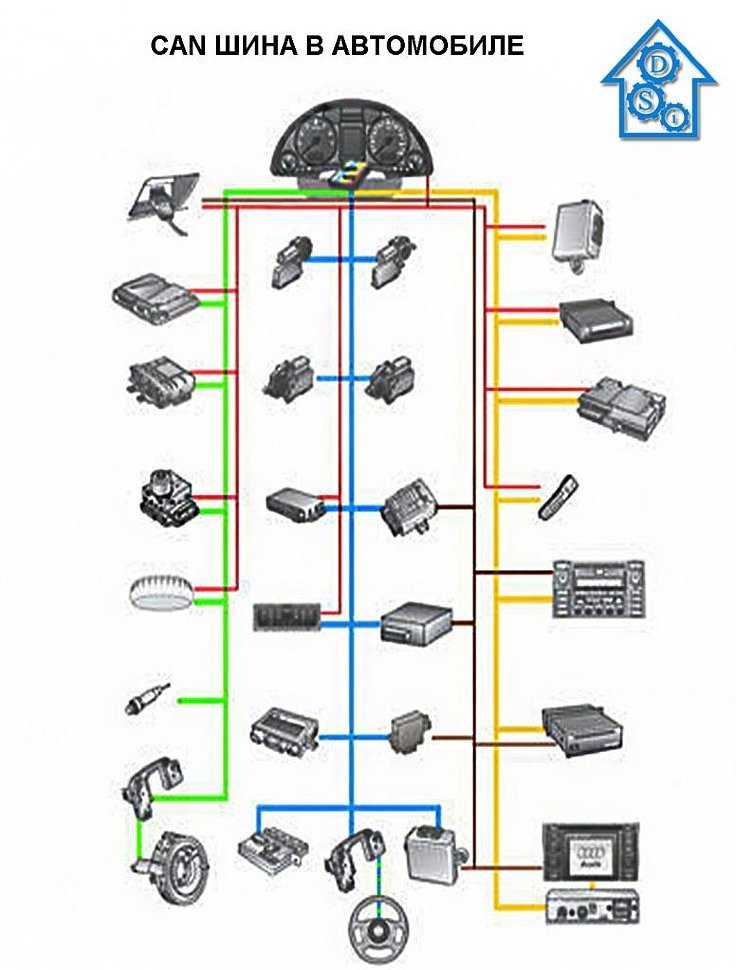
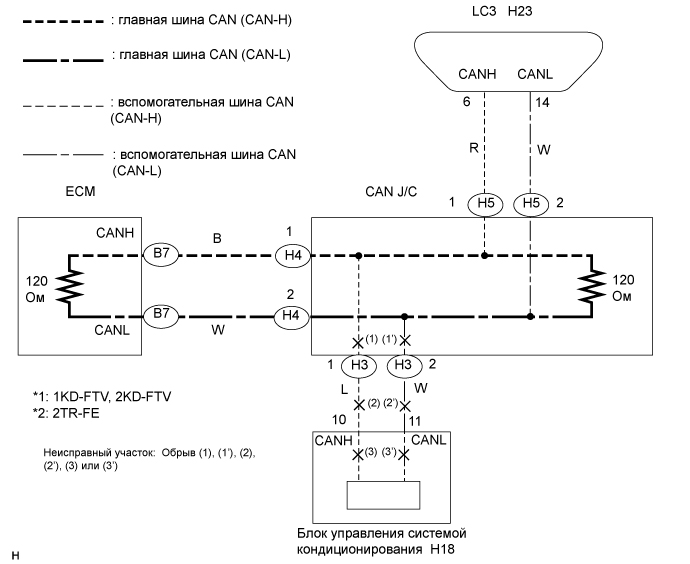
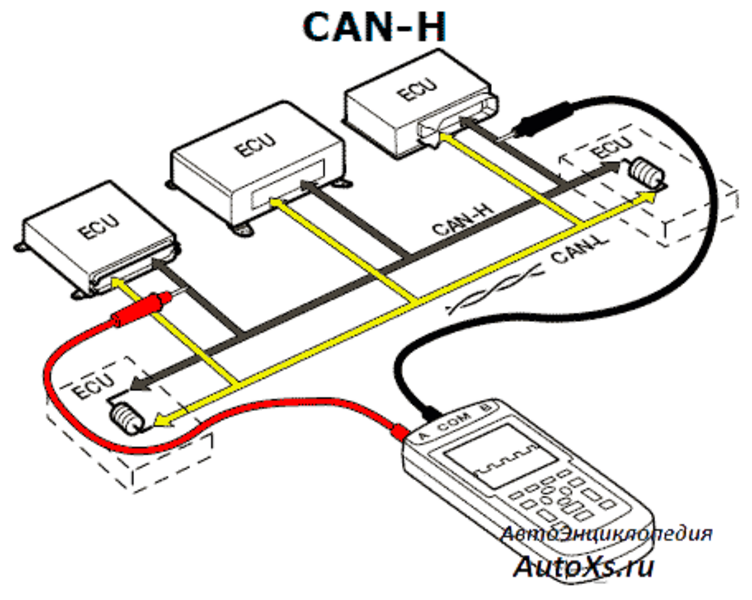
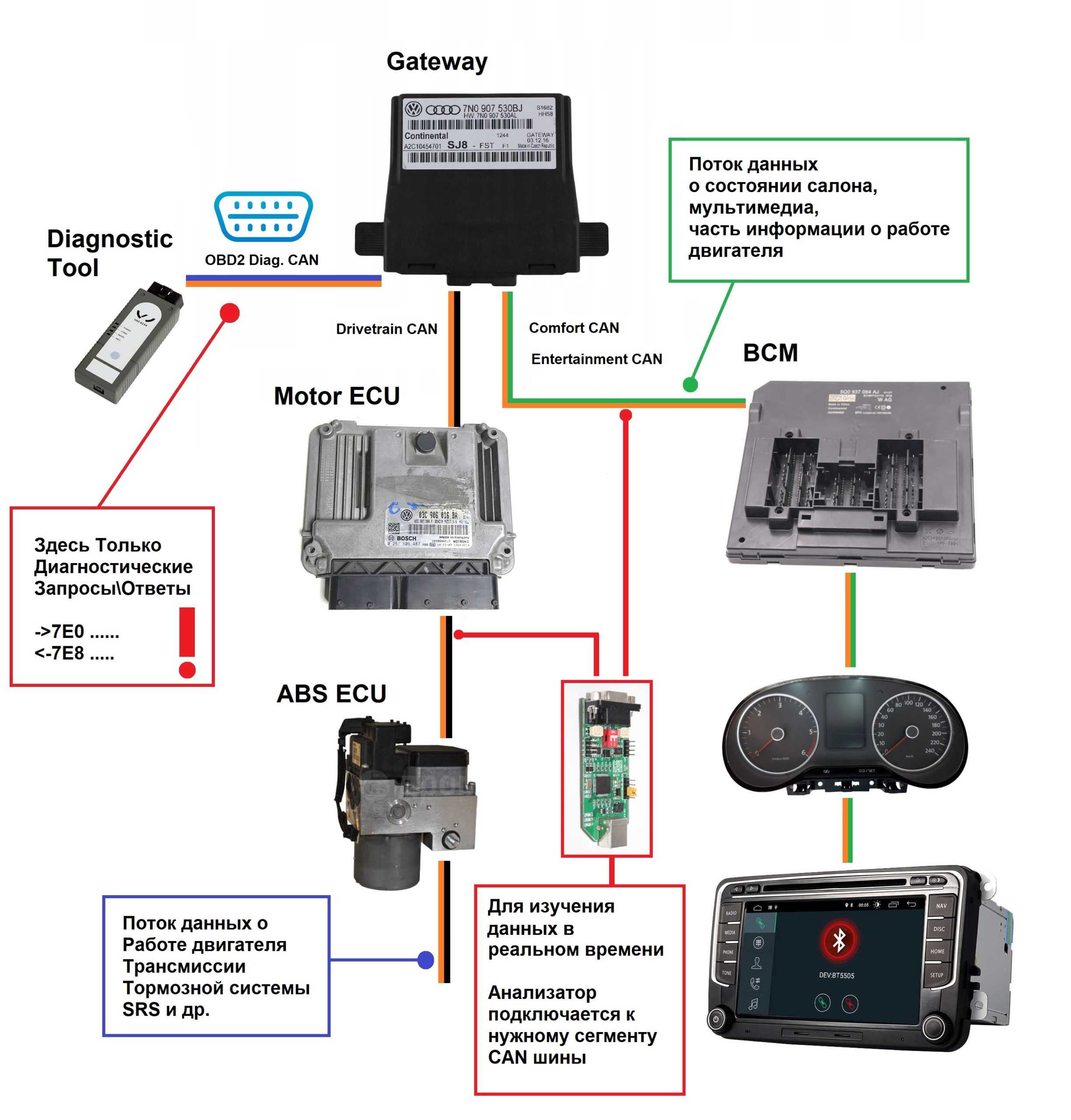
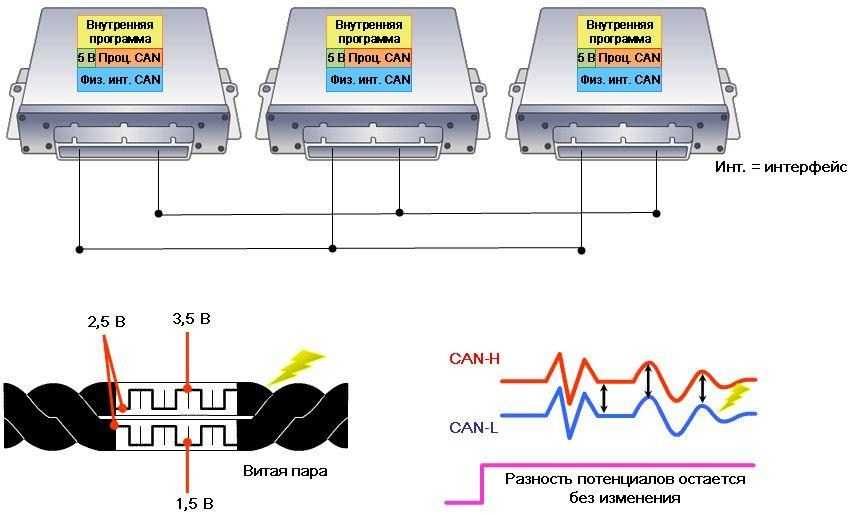
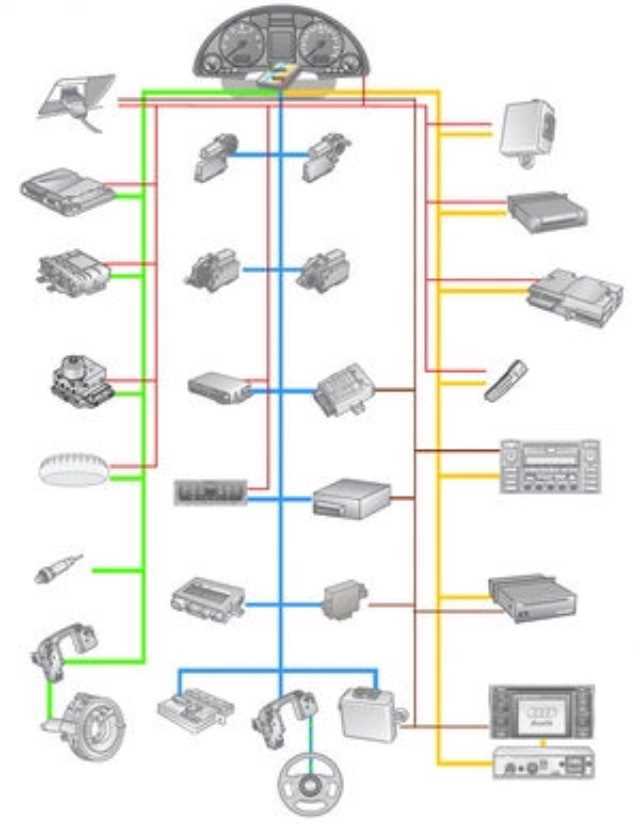
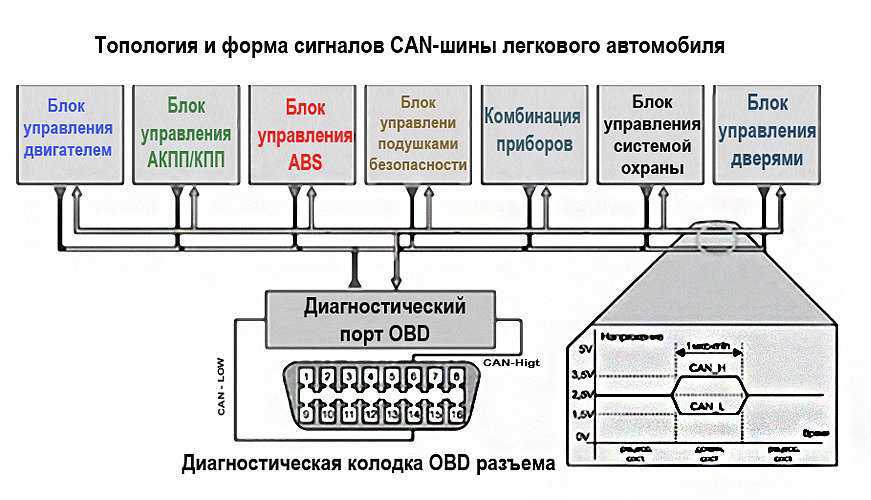
Структурно схему подключения различных блоков автомобиля к CAN-шине можно изобразить в таком виде:
p, blockquote 19,0,0,0,0 —>
p, blockquote 20,0,0,0,0 —>
Для согласования всех устройств, то есть организации оптимальных условий и скорости приемо — передачи, выходные сопротивления трансмиттеров должны быть приблизительно одинаковы.
p, blockquote 21,0,0,0,0 —>
В случае отключения или повреждения каких-либо из блоков управления систем автомобиля, сопротивление шины изменяется, нарушается согласование по сопротивлению, которое приводит к значительному уменьшению скорости передачи информации по шине. Такие нарушения могут привести к полной потере связи по CAN-шине.
p, blockquote 22,1,0,0,0 —>
На некоторых автомобилях для устранения проблем с синхронизацией CAN-информации применяется отдельный модуль межсетевого интерфейса.
p, blockquote 23,0,0,0,0 —>

p, blockquote 24,0,0,0,0 —>
Каждое сообщение, передаваемое по CAN-шине, имеет собственный идентификатор, например «температура охлаждающей жидкости» и код, соответствующий ее значению, типа «98,7 градусов Цельсия». Не обязательно это будут абсолютные значения, в большинстве случаев это относительные двоичные единицы, которые далее преобразуются в сигналы управления и контроля.
p, blockquote 25,0,0,0,0 —>

p, blockquote 26,0,0,0,0 —>
Эти же данные используют средства диагностики для контроля и обработки информации об основных системах автомобиля.
p, blockquote 27,0,0,0,0 —>
Основные режимы работы CAN-шины:
p, blockquote 28,0,0,0,0 —>
- активный (зажигание включено);
- спящий (при выключенном зажигании);
- пробуждение и засыпание (при включении и выключении зажигания).
Во время спящего режима ток потребления шины минимальный. Однако при этом по шине (с меньшей частотой) передаются сигналы о состоянии открытия дверей и окон, других систем, связанных с охранными функциями автомобиля.
p, blockquote 29,0,0,0,0 —>
В большинстве современных диагностических устройств предусмотрен режим диагностирования ошибок по CAN-шине. Технически это организовано непосредственным подключением проводников к диагностическому разъему.
p, blockquote 30,0,0,0,0 —>
p, blockquote 31,0,0,0,0 —>
CAN шина, как подключается автосигнализация к цифровой шине
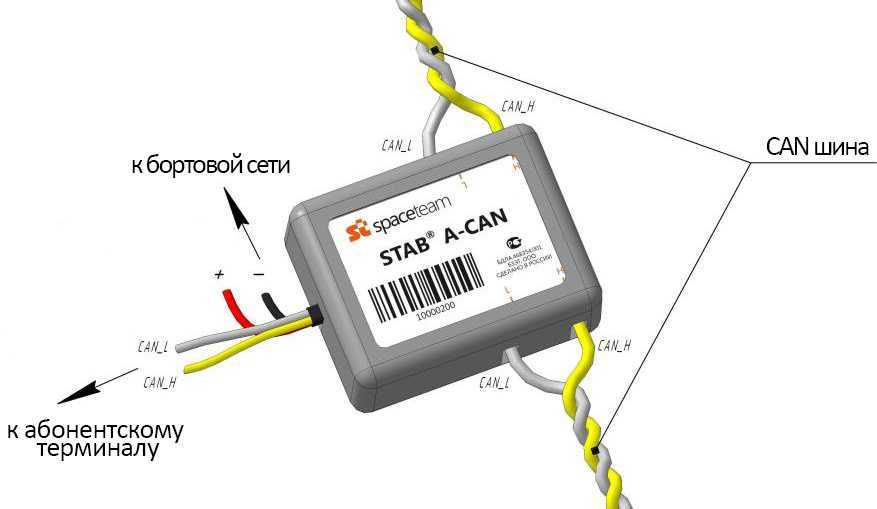
Анализатор цифровой шины справляется не только со внутренними системами и устройствами автомобиля. Подключение внешних элементов –сигнализация, датчики, другие устройства, добавляет цифровому устройству больше нагрузки, но при этом его продуктивность остаётся прежней. Автосигнализация, которая имеет адаптер для подключения к цифровой шине устанавливается по стандартной схеме, а для того, чтобы подключиться к CAN необходимо пройти несколько простых шагов:
- Автосигнализация по стандартной схеме подключается ко всем точкам автомобиля.
- Владелец транспортного средства ищет оранжевый, толстый провод – он ведёт к цифровой шине.
- Адаптер сигнализации подключается к проводу цифровой шины автомобиля.
- Производятся необходимые закрепляющие действия –установка системы в надёжном месте, изоляция проводов, проверка правильности произведённого процесса.
- Настраиваются каналы для работы с системой, задаётся функциональный ряд.
Возможности современной цифровой шины велики, ведь виток из двух проводов объединяет в себе доступ до всех основных и дополнительных систем автомобиля. Это помогает избежать наличия большого количества проводов в салоне и упрощает работу всей системы. Цифровая шина работает по типу компьютера, а это в современном мире очень актуально и удобно.
Последовательные интерфейсы RS-232, RS-422 и RS-485
RS-232 предшествует контроллерам и микрокомпьютерам, и его история восходит ко временам телетайпов и немых терминалов ввода/вывода. Он используется с 1962 г. и, несмотря на то, что не используется в ПК (вместо него мы теперь имеем привычный USB), он и его многоканальные братья RS-422 и RS-485 часто встречаются в лабораториях. И поскольку в современных компьютерах уже нет таких портов для связи с контроллерами или модемами, требуются переходники для подключения RS-232 к компьютеру через USB.
Наиболее важным продвижением стандарта RS-232 стала возможность уверенной передачи последовательности двоичных данных. Однако ограничения этого стандарта затрудняют его использование в мире, где контроллеры и компьютеры используют очень маленькие блоки питания. Кроме того, многоканальный RS-485 плохо реализован и требует доработки с помощью ПО и каких-либо обходных путей.
Протоколы RS-232 и RS-485 способны к двусторонней передаче и легко применимы в реализации двунаправленной связи на коротких дистанциях. Сегодня они часто используются для коммуникации лабораторного оборудования, анализаторов, присоединения удаленных систем безопасности к централизованной системе обеспечения контроля.
RS-422 использует для передачи витую пару, что позволяет преодолевать большие расстояния, чем с RS-485, однако он реализует P2P-соединение. Этот протокол позволяет подключать до 10 управляемых устройств (Slave), но управляющее устройство (Master) одно.
Несмотря на то, что RS-485 был основой для многих ранних стандартов связи, например Rockwell Automation/Allen-Bradley’s Data Highway и Profibus от Siemens, ни RS-232, ни RS-485 не были спроектированы с учетом требований кибербезопасности, так как в те времена Интернет не был столь широко распространен, и попытка подключения извне просто не рассматривалась.
Peugeot 308, 2007 — 2014 (T7) (beta-версия)
Ответы 30
Здравствуйте. Укажите, пожалуйста, подробнее:
Какой год выпуска автомобиля?
Какая модель сигнализации используется?
Какая версия ПО центрального блока?
Какая версия библиотеки CAN?
Где выполнены подключения цифровых шин?
2010 год, АКПП, обход заработал. При кручении стартером пропадает статус паркинга, повесил на массу и все ОК.
уважаемая администрация, почему удалён/перенесено обсуждение? Мы же тут тестируем бета прошивку, зачем создавать кучу тем с вопросами, создана же эта тема, не понимаю я Вас!?
Установка современной сигнализации требует не только знаний электротехники и понимания работы электроники автомобиля, но и понимания алгоритмов работы самой сигнализации.
НПО СтарЛайн настоятельно рекомендует обращаться к профессионалам для установки охранных комплексов, иммобилайзеров, маяков и прочей продукции.
Пежо 308, 2008, АКПП. S-96 не хотела включать стартер. Убрал из кана ПАРКИНГ все заработало. Обход по кану работает норм.




Здравствуйте. Прошу связаться с Вашим Региональным Представителем для проведения диагностики работы системы.
Cтавил А-93 на 308, 2008 г. обход имо работает, дожим работает, зеркала не складываются, убрал из кана ПАРКИНГ все заработало
Здравствуйте. Спасибо за сообщение.
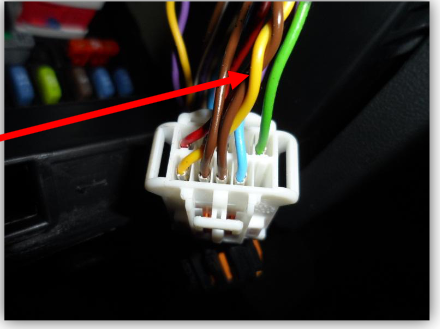
can B — в белом разъёме (там же, где зажигание со стартером) canH-8pin canL-10pin
И еще — не видит статус ручника по CAN
Здравствуйте. Какое устройство установлено, какие версии ПО использованы и как Вы проверяете чтение статуса стояночного тормоза?
Здравствуйте. e96v2 BT, ПО 2.22.4, прошивка бета 5-3-13-33292. Peugeot 308,2009г МКПП. Вот что не работает:
1) Slave не работает. При этом в Мастере по USB видятся оба CAN и все двери, багажник. В машине сканером Lexia сигнализация активирована в кодировках.
2) Обучение даже не стартует. После 14 нажатий, включаю зажигание и тишина. Зажигание по брелку видится исправно по CAN.
3) Замки работают через раз. В стабильной версии такого не наблюдается, но там нет обхода.4) Повесил канал Паркинга на минус, убрал его с CAN, выставил режим АКПП и автонейтраль. При заводке в Мастере в Диагностике все равно пишет «не стоит паркинг».
Ставил много раз на 308, 408, 3008 старлайны по CAN и все было ок. Честно, такой букет нюансов у старлайна я встречаю впервые
Не нужно подключать входы на массу. Этим Вы никак не помогаете система работать.
Прошу связаться с Вашим Региональным Представителем для проведения диагностики работы системы на этом автомобиле.
Доброго дня. А93 2can-2lin, прошивка блока S4, версия can 5.3.4, Peugeot 308 2009г МКПП. При попытке резервирования автозапуска — периодически пропадает статус ручника.
Здравствуйте. Спасибо за сообщение. Переслал разработчикам.
А93 v2 2can2linv3 прошивка beta 1.3.4 Peugeot 308 2009г АКПП обучение прошло после 4-6 попыток , slave не работает , альт.ц.з. не работает , по паркингу ошибка, доводчик не работает , комплектация с двумя стеклоподьемниками
Здравствуйте. Какая именно ошибка по паркингу у Вас возникает?
кто ставил с гсм топливо и пробег показывало ?
У Вас не работает уровень топлива и пробег?
Укажите, пожалуйста, подробнее:Какой год выпуска автомобиля?Какая модель охранной системы используется?Какая версия ПО центрального блока?Какая версия библиотеки CAN?Где выполнены подключения цифровых шин?
Версии ПО могут меняться несколько раз за день. Прошу указать точные номера версий, которые Вы использовали.
топливо и пробег появились, авто 2007или 2008 года
система А93 2CAN2LIN ,ПO GK74P4 если не ошибаюсь кан последняя версия с сайта все подключения шин согласно сайту.
Источник
PCI меняет все
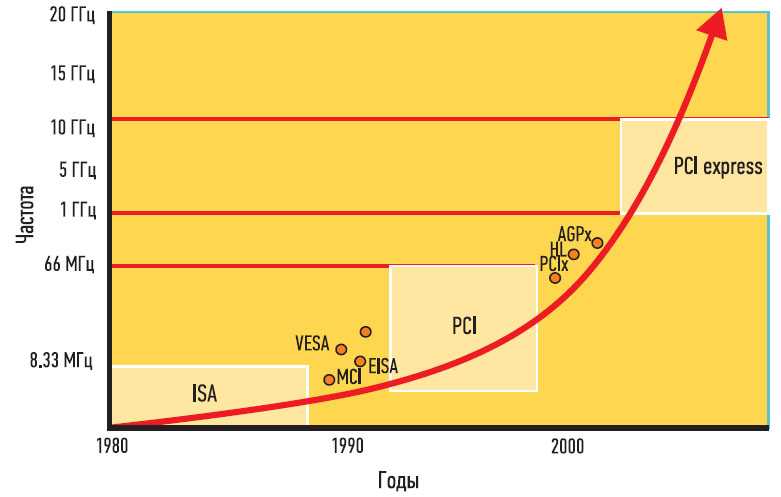
В начале 1990-х гг. PCI была представлена как способ связи чипов на материнской плате взамен недостаточно проработанной шины ISA. Она передавала данные с частотой 33 МГц, это больше, чем у ISA и ATA, распространенных в то время, и достаточно для большинства периферийных устройств.
Со временем производительность увеличилась до такой степени, что частота процессора возросла до 3 ГГц и более. К тому же появление гигабитного Ethernet и других сетевых протоколов привели к тому, что пропускная способность шины PCI стала достаточной только для одного периферийного устройства. Однако в момент своего появления PCI имела огромное превосходство над ISA и ATA, включая независимость процессора, изоляцию буфера, принцип Plug&Play. В короткое время шина объединила всю внутреннюю структуру ПК.
Однако PCI не была идеальной. Шло время, ограничение ее скорости стало серьезным препятствием для дальнейшего развития, тем более что пропускная способность шины была поделена между всеми устройствами. PCI была разработана без возможности управления питанием, что стало неудобно при наличии новых, маломощных устройств. Это накладывало очень строгие правила на маршрутизацию данных, и, что хуже всего, не было никакой поддержки передачи данных в режиме реального времени. Для решения этих и других вопросов разработчики следующего поколения шин сконцентрировались на улучшении PCI до PCI Express (PCIe).
Развитие технологий передачи данных
Последовательная шина PCIe работает со скоростью 2,5 Гбит/с, пакетируя данные PCI, а затем переходит в последовательный режим для передачи пакетов по каналу. Пропускная способность доступна в обоих направлениях, и производительность каждого слота может составлять от 200 Мбит до 3,2 Гбит в любом направлении, на вход или выход.





Появление PCIe — это громадный скачок в преодолении ограничения пропускной способности, по сравнению с PCI, при этом сохранена совместимость портов.
Уровневая структура PCIe обеспечивает тридцатикратное увеличение производительности, по сравнению с оригинальным интерфейсом PCI. Это делает возможным создание устройств ввода/вывода следующего поколения с высокой пропускной способностью для приложений с высокой производительностью, таких как высокоскоростная передача и сбор данных или промышленные мультимедийные приложения. Последняя эволюция интерфейса PCIe даже поддерживает виртуализацию аппаратных устройств ввода/вывода. Почти все современные видеокарты имеют интерфейс PCIe.
Необходимость вывода интерфейса вне компьютера привело к появлению ePCIe, или внешней шины PCIe, которую иногда называют кабелем шины PCIe. Такое развитие делает возможным расширение внутренней скоростной шины PCIe на внешние устройства ввода/вывода. Это, в свою очередь, приводит к увеличению производительности и достижению очень высокой скорости ввода/вывода, возможности управления движением и машинного зрения.
Новым вариантом PCIe, в котором заинтересована, в первую очередь, Apple, является Thunderbolt, которая сочетает в себе протоколы PCIe и DisplayPort и значительно улучшает работу графического дисплея и производительность HMI. Хотя Apple был создателем Thunderbolt, другие компьютерные компании также предлагают использовать его.
Поиск и устранение проблем при передаче данных по шине CAN
Отладка электронных блоков управления при помощи
Локальная сеть контроллеров (CAN) — это сеть топологии «шина», которая изначально разрабатывалась для автомобильных систем, но хорошо зарекомендовала себя и в других областях. Шина CAN представляет собой симметричный (дифференциальный) 2-проводной интерфейс, реализованный на экранированной витой паре, неэкранированной витой паре или ленточном кабеле. В стандарте для CAN определены несколько скоростей передачи данных, самая большая из которых составляет 1 Мбит/с. В самом последнем варианте шины — CAN FD — увеличена скорость передачи данных до 10 Мбит/с, а также полезная нагрузка пакетов данных. Для сохранения качества сигнала, передаваемого по шине, на каждом конце кабеля необходимо установить нагрузочное сопротивление 120 Ом.
С момента внедрения в 1980-х годах шина CAN использовалась для передачи данных между мощными электронными блоками управления; и так как многие производители предпочитают проверенные временем технологии, шины CAN и LIN остаются на своём месте в архитектуре современных автомобилей.
Повышение интеграции между подсистемами автомобиля означает, что кроме обработки сигналов датчиков и приводных механизмов, многие электронные блоки управления должны одновременно связываться с несколькими последовательными шинами (2, 3 и больше). Например, очень часто электронный блок управления обменивается данными с CAN (для критически важных систем) и LIN (для управления устройствами с более низким приоритетом, например окнами и зеркалами).
Сокращение сроков отладки за счёт автоматического анализа протокола
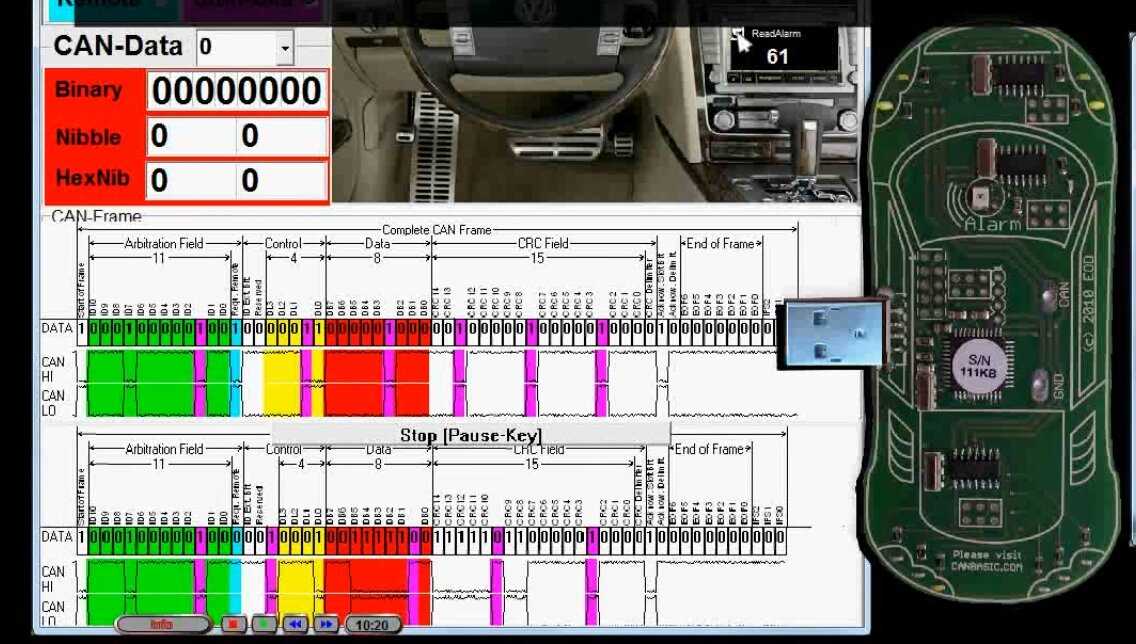
Ручное декодирование протоколов последовательных шин требует огромных затрат времени и не обходится без ошибок. Пакеты программного обеспечения Tektronix для запуска и декодирования сигналов с автомобильных шин обеспечивают простой и безошибочный автоматический запуск с декодированием сигналов электронных блоков управления с таких распространённых шин, как CAN, CAN FD, LIN и FlexRay.
Сигнал CAN FD на канале 1 декодируется и отображается в виде сигнала с шины (снизу) и таблицы событий (сверху)
Поиск и устранение проблем качества сигналов
Хотя декодирование протоколов — это только начало.
Часто самым эффективным способом обнаружения таких проблем, возникающих из-за искажений сигналов в физическом слое (из-за перекрёстных помех, шума и неправильного нагрузочного сопротивления), является анализ осциллограммы. При помощи осциллографа можно проверить осциллограмму аналогового сигнала с шины и оценить качество сигнала и шум, а также проанализировать взаимодействие нескольких сигналов и обнаружить перекрёстные помехи.
Для шины CAN требуется нагрузочное сопротивление 120 Ом. Шина без нагрузочного сопротивления снижает качество сигналов (верхняя часть).
Визуализация нескольких каналов/датчиков/ исполнительных механизмов
Электронные блоки управления через CAN, LIN и другие шины связываются непосредственно с датчиками и приводными механизмами.
Для систем с несколькими шинами и рядом датчиков/исполнительных механизмов часто сложно получить общую картину рабочей среды.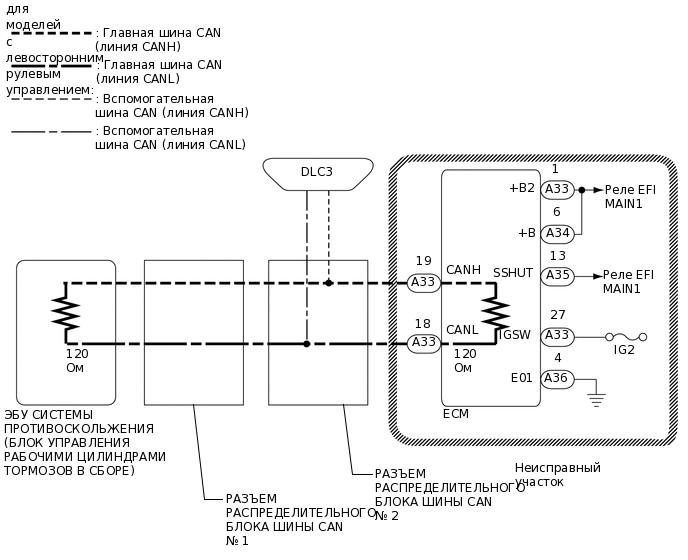
Большинство осциллографов Tektronix позволяют осуществлять одновременный просмотр и контроль сигналов с нескольких шин. В осциллографах смешанных сигналов цифровые каналы используются для декодирования сигналов с шин, что высвобождает аналоговые каналы для оценки качества сигналов. Самую полную характеристику сложных электронных блоков управления обеспечивает осциллограф MSO Серии 5, отличающийся большим числом каналов, наличием входов FlexChannel и большим дисплеем с высоким разрешением.
Примечание по применению
Узнайте, как выполнять отладку шин CAN, LIN и FlexRay автомобильных систем при помощи осциллографа.
Загрузить СЕЙЧАС
Видео
В этом видео описывается порядок настройки автоматического запуска, декодирования и поиска в сигналах с шин CAN или CAN FD при помощи осциллографа смешанных сигналов MSO Серии 5.
ПОСМОТРЕТЬ СЕЙЧАС
Возникают сложности в других областях использования автомобилей с сетевыми возможностями?
Тестирование автомобильных устройств на базе Ethernet
Поиск и устранение проблем при передаче данных от датчиков по шине SENT
ЭМП/ЭМС
Диагностика автомобиля — зачем она нужна
Какой бы надёжностью ни обладали современные транспортные средства, в любом случае может произойти сбой какой-либо системы и за помощью автовладелец обращается в специализированный автосервис. Основной ремонт автоэлектрики заключается в её диагностировании, а затем ремонте всего электромеханического и электрического оборудования машины.
Диагностику проводят для установки рабочего состояния электромеханических и электрических частей авто. Диагностика автоэлектрики поможет выявить нарушенные контакты, загрязнившиеся или окисленные соединения в электропроводке. Квалифицированный автоэлектрик своевременно обнаружит и предотвратит поломку любого узла автоэлектрики машины.
Нынешние автомашины оборудованы многопрограммным управлением, поэтому ремонт должен проводить автоэлектрик-диагност.
Диагносты проходят обучение в крупнейших автосервисах, они тщательно изучают механическое оборудование автомашины, автоэлектрическую цепь и работу двигателя.

Некоторые думают, что подключённый прибор диагностики указывает не только ошибки в системе автомобиля, но и укажет причину поломки, но это далеко не так. Компьютер диагностики находит следствие неисправности, а вот причину сможет установить и устранить только разбирающийся в этом специалист.
Как работает КАН-шина?
Современный автомобиль, это не просто набор запчастей, проводов и металла – это настоящий компьютерный комплекс, состоящий из множества сложных систем. Объединять и передавать полученную с датчиков информацию призвано такое устройство как кан-шина. В этой статье расскажем о ней более подробно.
Как работает кан-шина и что это такое?
КАН-шина – это устройство по которому происходит обмен и передача информации между бортовым компьютером и штатными датчиками. Также кан-шина передает управляющие команды и запросы.
Для распространения информации в сообщения включаются разного рода идентификаторы. Они абсолютно разные и способны сообщить, например, что скорость транспортного средства в данный момент времени 55 км/ч. Серия из сообщений отправляется на все все устройства, но обрабатывают эти сообщения только те, которым оно предназначено.
Какие функции КАН-шина выполняет в автомобиле?
– упрощает подсоединение дополнительных приборов и систем;
– мешает внешним факторам влиять на работу электронных приборов;
– одновременно передает, анализирует и получает информацию с устройств;
– делает более быстрой передачу сигналов к иным устройствам;
– сокращает количество необходимых проводов.
Как проверить КАН-шину в автомобиле?
Иногда в системе КАН могут происходить неполадки, и тогда она автоматически сообщает какой из ее блоков управления не может получать информацию. И тогда для поиска места повреждения можно воспользоваться мультиметром.
Как проверить КАН-шину мультиметром?
Необходимо с помощью мультиметра измерить сопротивление между проводами (в любом месте) Hi (Высокое) и Lo (Низкое) шины CAN. Если сопротивление равно 60 Ом, то повреждений нет. Если же сопротивление между проводами имеет значение примерно 120 Ом, то можно сказать о том, что один или оба провода шины CAN повреждены.
Чтобы найти место повреждения необходимо измерить сопротивление провода CAN-Lo между двумя блоками. Сопротивление должно быть равно 0, если же между измеряемыми точками сопротивление равно 240 Ом, то провод поврежден между этими точками. Точно такие же измерения необходимо проделать и с проводами Hi.
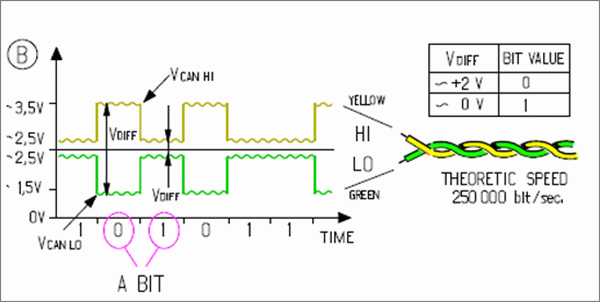
Чтобы убедиться, что КАН-шина работает, важно понаблюдать за связью по кан-шине. Для это понадобиться осциллограф
С его помощью можно измерить напряжение между проводом высокого (Н) или низкого (L) уровня. Сигнал должен получиться прямоугольным в пределах напряжения:
Низкий уровень CAN относительно массы: U мин = 1 В и U макс = 5 В
Высокий уровень CAN относительно массы: U мин = 0 В и U макс = 4 В
Эти значения являются приблизительными и могут отличаться, в зависимости от нагрузки шины, на величину до 100 мВ.
Итак, что же такое КАН-шина – это система, которая управляет электрическими устройствами, а также цифровой связью. Шина объединяет информацию со всех устройств и помогает им обмениваться ею. Все данные по кан-шине передаются по двум витым проводам. CAN-шина намного упрощает монтаж дополнительного оборудования, помимо этого снижает количество проводов в жгутах, что делает электросистему более надежной.





Синфазная индуктивность шины CAN / синфазный дроссель.
Включение дроссельных катушек синфазного сигнала в дифференциальные линии передачи может эффективно устранить синфазный шум.
Дифференциально передаваемый излучаемый шум
Дроссельная катушка синфазного режима, показанная на рисунке, подключена последовательно с линией дифференциального сигнала.Дроссельная катушка синфазного режима может пропускать необходимый сигнал дифференциального режима во время передачи данных, уменьшая при этом синфазный шум. Взаимодействие с другими людьми
Синфазная дроссельная катушка последовательно с линией дифференциального сигнала
Подготовка к измерению сопротивления CAN-шины
Перед началом измерения сопротивления CAN-шины необходимо выполнить несколько подготовительных шагов:
- Отключите питание системы, в которой установлена CAN-шина. Это поможет предотвратить возможные повреждения при выполнении измерений.
- Установите мультиметр в режим измерения сопротивления (Омметр).
- Удостоверьтесь, что мультиметр функционирует именно для измерения сопротивления (Омметра), а не для измерения напряжения или других параметров.
- Проверьте, что провода мультиметра в хорошем состоянии и не имеют повреждений. Провода с повреждениями могут дать неточные результаты измерения.
После выполнения этих шагов можно приступать к измерению сопротивления CAN-шины.
CAN шина, как подключается автосигнализация к цифровой шине
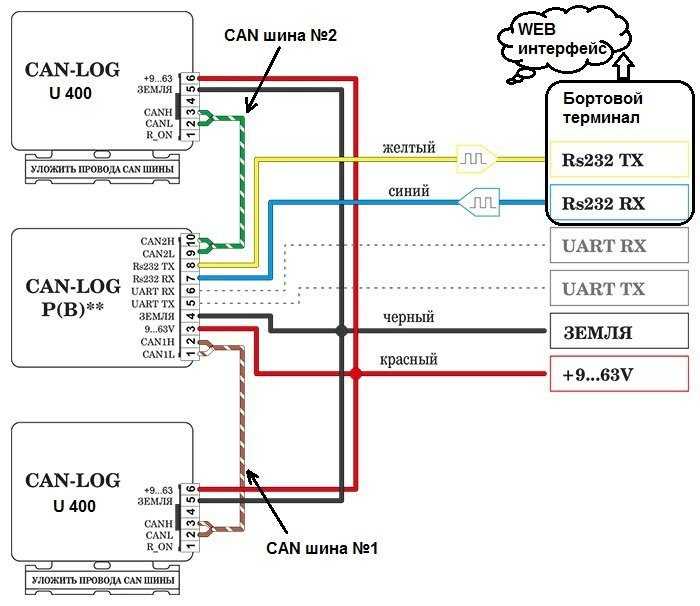
Анализатор цифровой шины справляется не только со внутренними системами и устройствами автомобиля. Подключение внешних элементов –сигнализация, датчики, другие устройства, добавляет цифровому устройству больше нагрузки, но при этом его продуктивность остаётся прежней. Автосигнализация, которая имеет адаптер для подключения к цифровой шине устанавливается по стандартной схеме, а для того, чтобы подключиться к CAN необходимо пройти несколько простых шагов:
- Автосигнализация по стандартной схеме подключается ко всем точкам автомобиля.
- Владелец транспортного средства ищет оранжевый, толстый провод – он ведёт к цифровой шине.
- Адаптер сигнализации подключается к проводу цифровой шины автомобиля.
- Производятся необходимые закрепляющие действия –установка системы в надёжном месте, изоляция проводов, проверка правильности произведённого процесса.
- Настраиваются каналы для работы с системой, задаётся функциональный ряд.
Зачем нужно сопротивление в шине CAN
Шина CAN (Controller Area Network) — это стандарт промышленной сети, используемый для обмена данными между устройствами в автомобилях, промышленном оборудовании и других приложениях. Одной из важных составляющих шины CAN являются сопротивления. Сопротивление в шине CAN необходимо для обеспечения правильной работы и стабильности передачи данных.
Основные причины использования сопротивлений в шине CAN:
Импеданс соответствия: Сопротивления в шине CAN регулируют импеданс соответствия, что позволяет согласовать импеданс шины с импедансом устройств, подключенных к шине
Это важно для минимизации отраженных сигналов и исключения возможности появления нежелательных искажений.
Защита от шумов и помех: Сопротивления в шине CAN помогают защитить систему от шумов и помех, которые могут возникать в процессе передачи данных. Они действуют как фильтры, поглощая и обезвреживая внешние электромагнитные помехи, которые могут искажать сигналы и приводить к неправильной работе системы.
Терминирование сети: Сопротивления в шине CAN также выполняют функцию терминирования сети
Это означает, что они создают конечное сопротивление в концах шины, что помогает предотвратить отражение сигналов и обеспечить стабильность передачи данных.
Улучшение сигнальных характеристик: Сопротивления в шине CAN также влияют на сигнальные характеристики системы. Они помогают контролировать скорость нарастания и спада сигналов, что позволяет более надежно и эффективно передавать данные.
Общая схема включения сопротивлений в шину CAN выглядит следующим образом:
| Конец шины CAN | Сопротивление |
|---|---|
| Конец 1 | 120 Ом |
| Шина CAN | Не подключено |
| Конец 2 | 120 Ом |
Подключение сопротивлений в шине CAN помогает обеспечить правильную работу системы передачи данных, снизить вероятность ошибок и улучшить стабильность передачи информации.
Modbus — стандарт связи для ПЛК
Представленный компанией Modicon в конце 70-х годов Modbus (сокр. от Modicon Bus) был разработан специально для промышленных контроллеров. В те времена фирме (теперь это часть Schneider Electric) принадлежала существенная доля рынка ПЛК и промышленных контроллеров, и требовалось разработать надежный метод передачи данных между ними.
Modbus стала самой успешной шиной в истории, и тому было несколько причин. Во-первых, простота и надежность. Во-вторых, она распространяется по лицензии «роялти-фри» и администрируется сторонней организацией (Modbus Organisation). В-третьих, этот стандарт прост в обслуживании и использовании, и способ передачи данных не накладывает серьезных ограничений на поставщиков оборудования. Сейчас Modbus существует в нескольких разновидностях:
- Modbus RTU используется для соединения SCADA-систем и RTU в таких областях, как водоснабжение и канализация, электроснабжение, источники альтернативной энергии, нефте- и газопроводы.
- Modbus TCP/IP используется для соединения через порт 502.
Кроме того, Modbus используется в смешанных сетях, а также легко распространяется и на сети Ethernet.