Introduction to CAN-TP (ISO 15765) Tutorial
The ISO 15765-2 CAN-TP Protocol is an international standard protocol used for sending more than 8-bytes of data over the CAN consecutive frames. It was not possible in normal CAN data frames limited to the only maximum of 8 – bytes of the data. The ISO transport protocol is on the fourth layer (transport layer) of the OSI layer model.
The ISO TP defined a transmission method that allows to the send up to 4096 bytes via the CAN-bus. For this, the messages to be sent are segmented and individual CAN frames divided. The most common application for ISO-TP is the transfer of diagnostic messages with OBD-II equipped vehicles using KWP-2000 and UDS but is also used broadly in other application-specific CAN implementations. The CAN-TP is implemented over the CAN stack so to identify it there are two types of addressing which are:
Протокол UDS
Диагностические данные от двигателя по протоколу UDS (Skoda Octavia A7)
Пример запроса и ответа температуры моторного масла:
Запрос температуры моторного масла:
-
7E0 — Адрес назначения (ЭБУ двигателя)
-
Байт 0 (0x03) — Размер данных (3 байта)
-
Байт 1 (0x22) — SID идентификатор сервиса (запрос текущих параметров)
-
Байт 2, 3 (0x11 0xBD) — PID идентификатор параметра (температура моторного масла)
-
Байт 4, 5, 6, 7 (0x55) — Заполнитель до 8 байт
Ответ температуры моторного масла:
-
7E8 — Адрес источника (Диагностический прибор)
-
Байт 0 (0x05) — Размер данных (5 байт)
-
Байт 1 (0x62) — Положительный ответ, такой SID существует. 0x22 + 0x40 = 0x62. (0x7F) — отрицательный ответ
-
Байт 2, 3 (0x11 0xBD) — PID идентификатор параметра (температура моторного масла)
-
Байт 4, 5 (0x0B 0x74) — значение температуры моторного масла (20.1 °C формулу пока что не смог подобрать)
-
Байт 6, 7 (0x55) — Заполнитель до 8 байт
Первая версия мобильного приложения VAG Virtual Cockpit умела подключаться только к приборной панели по UDS.
VAG Virtual Cockpit — экран с данными от приборной панели по протоколу UDS
Будущее J1850 шины
Описывая характеристики J1850 шины, нельзя не упомянуть перспективные возможности данного протокола. На момент создания шины ее возможности позволяли устранить многие проблемы, связанные с передачей информации на автомобилях. Однако на сегодняшний день появились новые опции и технологии, способные усилить эффективность J1850.
Со временем, к J1850 шине были добавлены новые функции, такие как поддержка высокоскоростной передачи данных, возможность управления системой круиз-контроля и автоматический повтор передачи данных, если они были потеряны в процессе передачи.
Однако, несмотря на эти изменения, в настоящее время производители автомобилей склоняются к созданию новых протоколов передачи данных. Это может быть связано с технологическими ограничениями J1850, а также с появлением новых стандартов связи, которые в настоящее время получают все большее распространение.
Следует отметить, что J1850 все еще широко используется и имеет свои преимущества. Он остается одним из наиболее распространенных протоколов передачи данных в автомобилях, но в будущем могут появиться более интересные решения.
9.Отличия ELM327 от К-Лайн
1ELM 327 относятся к мультипротокольным адаптера и в большей степени подходят для работы с CAN шиной. В отличие от К-Лайн, вычислительные операции производятся внутри логики, до преобразования в команды высшего уровня. Это означает, что данный считыватель не предназначен для глубокого анализа систем машины.2ELM327 в профессиональных кругах называется «градусником». Он позволяет выявить дефект, но не всегда может его устранить. Ввиду слабой вычислительной мощности контроллера, устройство не обеспечивает полноценного обмена пакетами данных. 3В сети можно найти схему переработки стандартного ELM327 в K-Line. Переделка заключается в несложных манипуляциях с электронной схемой, в результате чего получаем контроллер K+CAN.
First Frame (FF – 0x1) in CAN-TP (ISO 15765)
In Controller Area Network – Transport Protocol (CAN-TP) ISO15765-2, the “First Frame” refers to the first message frame in a multi-frame message. This message type is used to initiate the transmission of a large data block. It includes information such as the total size of the data block and the size of each subsequent frame.
When a large message is sent over the CAN bus, it is divided into several smaller frames to ensure reliable and efficient transmission. The First Frame is used to initiate this process and contains important information about the message, such as its total length and the number of frames that will be used to transmit it.
The structure of the First Frame message is defined by the ISO15765-2 standard and includes a header that contains information about the message, such as the message length and a unique identifier (ID) that allows the recipient to associate the message with the correct application. The data field of the First Frame contains the first part of the message data, up to a maximum of 4096 bytes.
Once the First Frame has been successfully transmitted and received, the following frames, known as Consecutive Frames, are sent to transmit the remaining parts of the message data. The use of multiple frames allows for more efficient use of the available bandwidth on the CAN bus and ensures reliable transmission even in noisy environments.
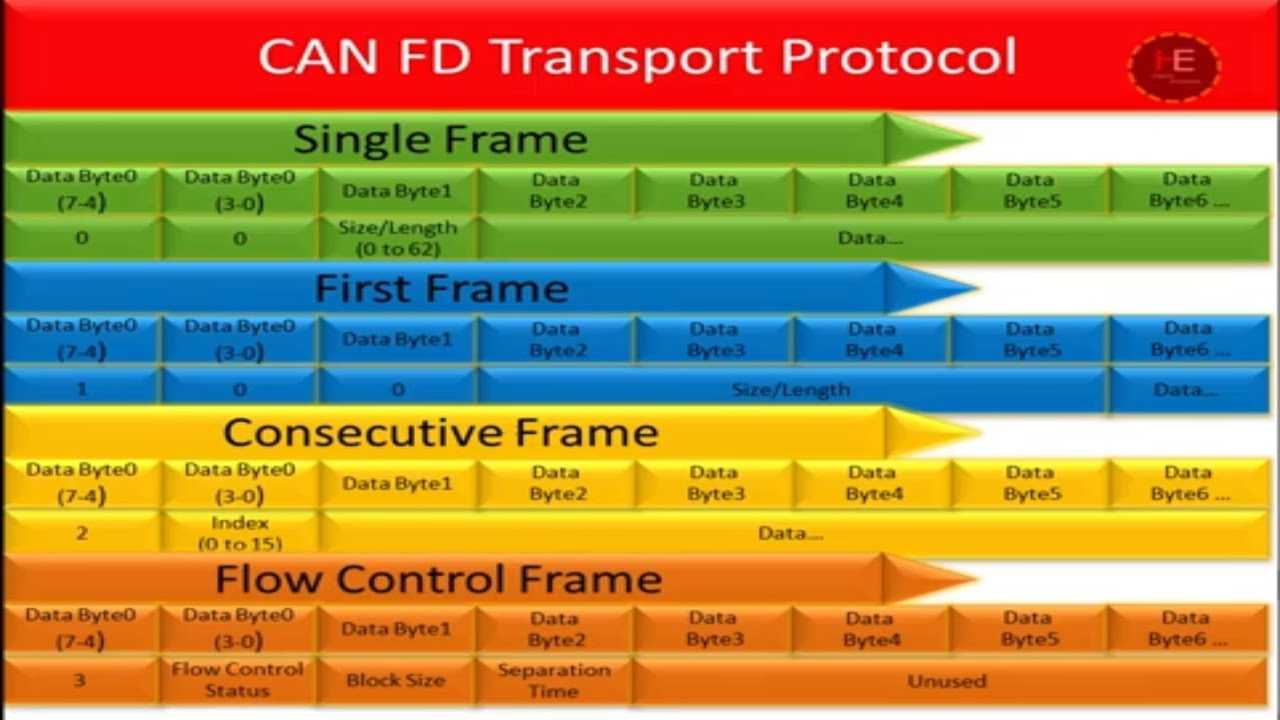
The first frame is an initial message of the multi-frame message packet in CAN-TP Protocol. It is used when more than 6 or 7 bytes of data segmented must be communicated. The first frame contains the length of the full packet, along with the initial data.
CAN-TP: First Frame Format
In FF, the first 2-bytes are used for the PCI, where the MSB 4-bit of the 1st byte is used for the type of frame and the LSB 4-bit and next 1-byte (total 8+4 = 12 bit)of the CAN data field is used for DLC (2^12 = 4096 data bytes). so in FF, only 6-bytes of the data can be transferred for the first time. This frame is responsible for sending the information to the receiver about the information as to how many total data bytes he is going to send.
Example of First Frame in CAN-TP (ISO 15765)
The below table shows an example of how the CAN-TP implemented in CAN Data field using First Frame.
| 10 | 64 | 01 | 02 | 03 | 04 | 05 | 06 |
CAN Datafield with CAN-TP Using First Frame (Request: Client –> Server)
-
PCI Header (0x1064): In FF, it is 2 byte.
- Last 4 MSB is “1” is defining the Frame Type is First Frame.
- First 4 LSB plus next 1 byte (Total = 4 LSB + 1 Byte) is Payload. 0x0 + 0x64 = 0x64 in decimal, it is 100 byte of data.
- Payload: Next 6 bytes (01 – 06) are the original data that is sending to the receiver from total 100 bytes. So remaining 94 bytes will be sent consicutively by using the Consecutive Frames.
10.Минусы и плюсы K-Line
|
Минусы |
Плюсы |
|---|---|
|
Невозможность обеспечить высокую скорость соединения (требует модернизированных прошивок) |
Недорогое решение |
|
Существуют случаи «зависания» оборудования без очевидных причин |
Для диагностики не нужно специального оборудования |
|
Наличие китайских некачественных подделок |
Доступность большого количества базовых настроек |
|
Для глубокого сервиса блоков управления, изменения заводских регулировок, базовый K-Line слабо подходит |
Согласованность с разным ПО |
|
В дорогих вариантах предусмотрена полная гибкость в настройке ЭБУ |
|
|
Вариант совместим с автомобилями разных годов |
Неисправности ЭБУ и их признаки
Повредить ЭБУ довольно сложно, но можно. Выйти из строя может как «железо», то есть сама плата или ее отдельные компоненты, так и программное обеспечение. Физические неисправности всегда хуже, поскольку не решаются перепрошивкой, а требуют ремонта или замены устройства. Учитывая стоимость контроллера, можно понять, почему при появлении первых подозрений на неисправность ЭБУ нужно срочно решать проблему, пока она не зашла дальше.

Поиск несправностей
- Физическое воздействие на устройство: удары, падение, вибрация.
- Попадание на плату воды или масла.
- Перегрев.
- Короткое замыкание.
- Коррозия.
- Неправильно проведенное «прикуривание».
- Неграмотный чип-тюнинг.
Проблемы и сбои в работе ЭБУ сказываются в первую очередь на работе двигателя, поскольку именно он больше всего требует точности управления.
- Любые сбои в работе двигателя, нестабильные обороты, повышенное потребление топлива, «троение», пропуски зажигания.
- Тяжелый старт двигателя, потеря точности и легкости управления.
- Произвольное включение или отключение отдельных функций (например, вентилятора охлаждения двигателя).
- Периодически перегорают предохранители.
- Некорректная работа педали газа – туго, с замедлением ответа.
- Блокировка отдельных узлов – дверей, сцепления, самого двигателя.
- Загорается сигнал ошибки на панели приборов.
- При подключении сканера система показывает некорректные данные.
Types of OBD2 protocols
Below,
you will find OBD2
protocols by vehicle make and model:
SAE J1850 PWM
Connectors
with pins 2 and 10 are SAE J1850 PWM protocol. It operates at 41.6 kb/sec and
is mostly found in Ford vehicles. The signal produced by it is Pulse Width
Modulation.
SAE J1850 PWM must have pins 2, 4, 5, 10, and 16.
SAE J1850 VPW
This protocol is found in GM vehicles. It works at a speed of 10.4 kb/sec with variable pulse width.
SAE J1850 VPW must have pins 2, 4, 5, and 16. The biggest difference between VPW and PWM is that this OBD2 protocol has no pin 10.
ISO 9141-2
Next, ISO 9141-2 is an old protocol that is mostly found in European vehicles that were built between 2000 and 2004. You will find this protocol on some Chrysler and Asian vehicles as well.
It uses pin 7 and pin 15 is optional (pin 4, 5, and 16 are must-haves). The operating speed is 10.4 kb/sec and this protocol uses asynchronous serial communication.
ISO 9141-2 protocol
Credit: youtube.com
ISO 14230 KWP2000
It
works on an asynchronous serial communication method that operates at 10.4 kbps
per second.
This type of protocol is found in Asian vehicles or in 2003+ vehicles that have a pin 7 ISO 9141 K-Line while pin 15 is optional. It’s also commonly used in Chrysler and most European models.
Because it is similar to the ISO 9141-2 protocol (the same pins), you may have difficulty identifying this OBD2 protocol.
ISO 15765-4 CAN (SAE J2480)
Lastly, the ISO 15765-4 CAN is found in modern vehicles (US) that are built in 2008 or later.
This protocol must have pins 4, 5, 6, 14, and 16.
Furthermore, this OBD2 protocol has 4 variants:
- ISO 15765-4 CAN (250 Kbaud,
11 bit ID) - ISO 15765-4 CAN (250 Kbaud,
29 bit ID) - ISO 15765-4 CAN (500 Kbaud,
29 bit ID) - ISO 15765-4 CAN (500 Kbaud,
11 bit ID)
It works on a two-wire communication method and can handle up to 1 Mbps.
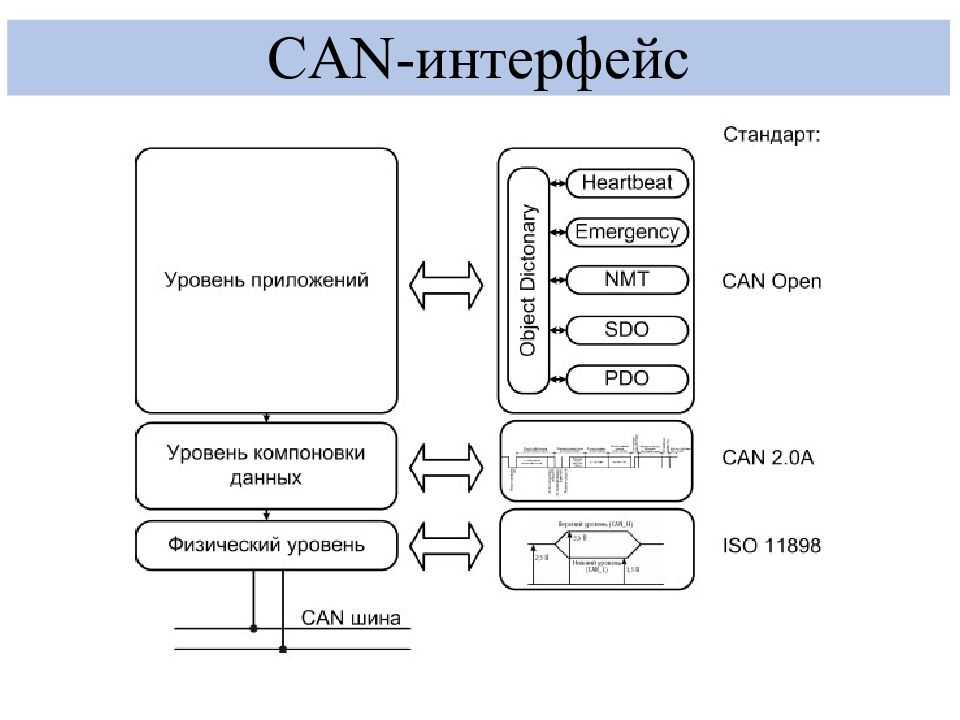
Чип связи электронного блока управления
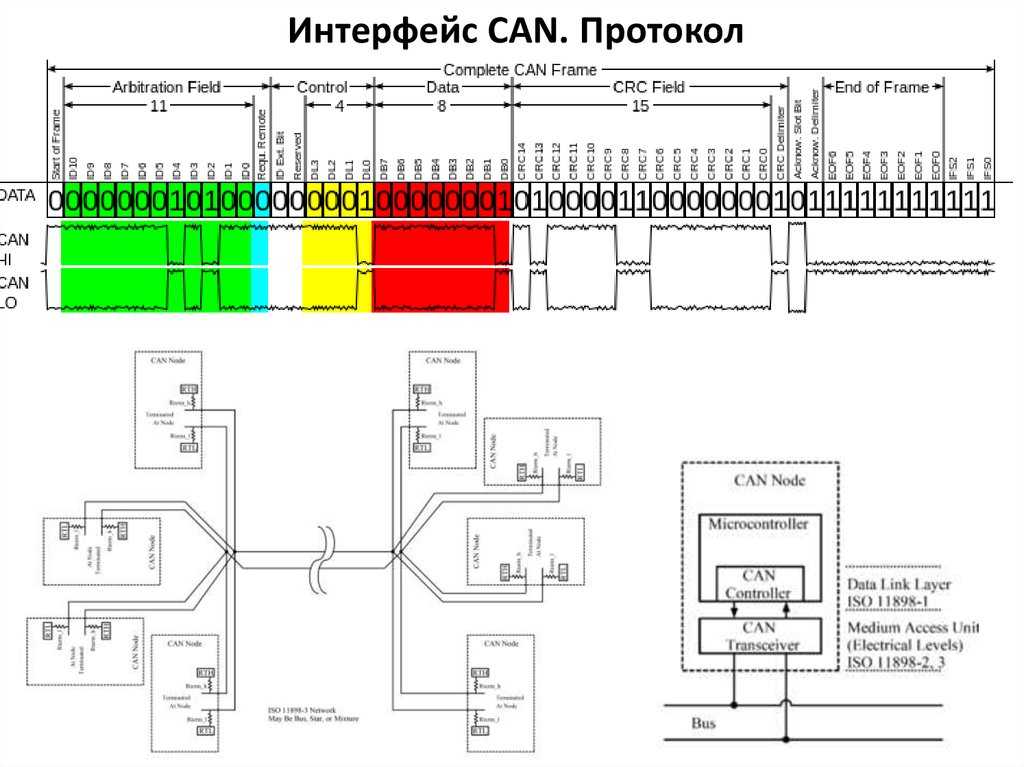
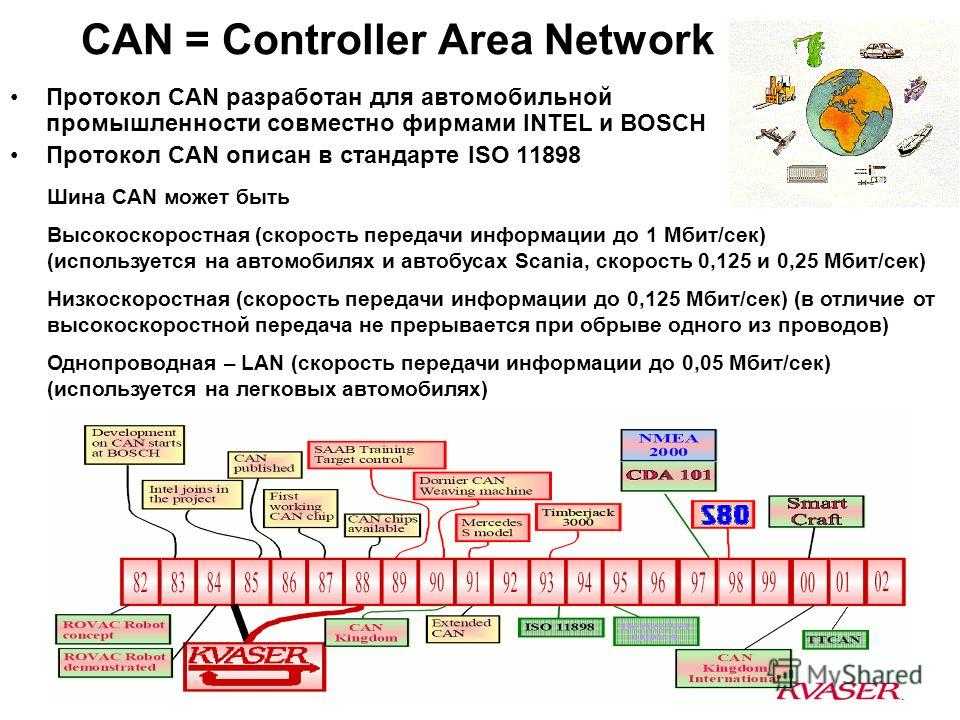
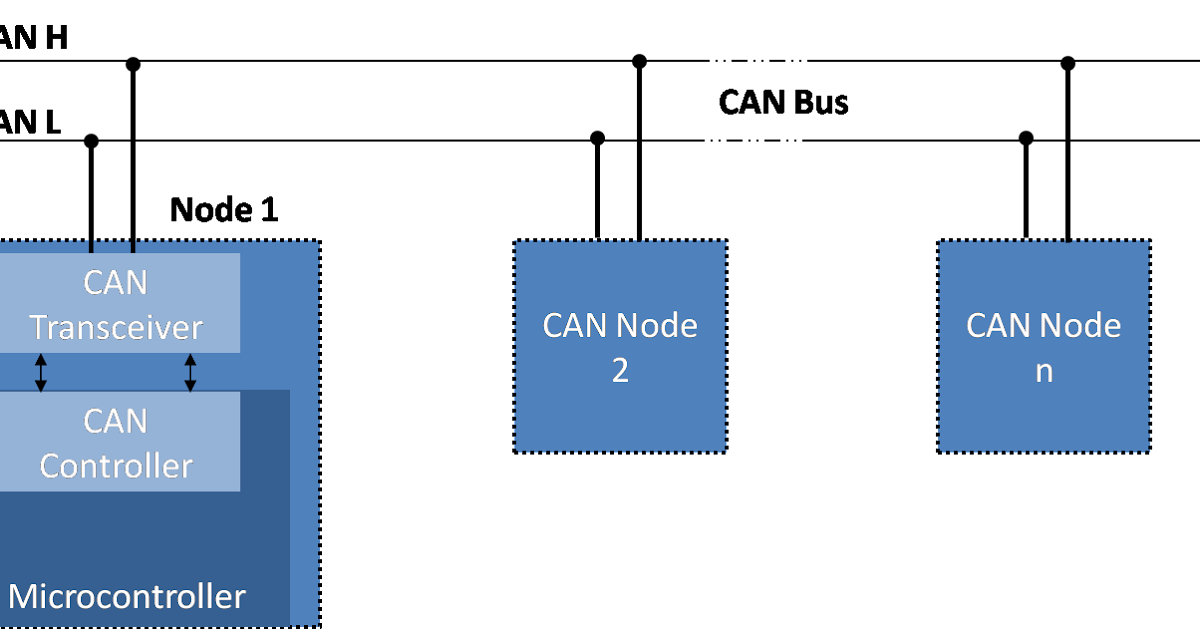
Чип связи ЭБУ предназначен осуществлять связь с диагностическими устройствами. Диагностические устройства подчиняются установленным протоколам связи. Как правило, используются пять коммуникационных протоколов. При этом на автомобилях новых разработок доминирует протокол CAN (Controller Area Networking).
Автомобили среднего класса имеют на борту блок управления двигателем, запрограммированный на заводе изготовителе, который не допускает перепрограммирования. Между тем, на автомобилях более высокого класса бортовые компьютеры допускают перепрограммирование и обновление программного обеспечения (ПО).
Такого рода бортовые компьютеры предусматривают обновления последними или модифицированными программными решениями для конкретной модели автомобиля. Если стандартный электронный блок управления, установленный на двигателе, не перепрограммируется, на рынке представлен широкий спектр ЭБУ, которые программируются.
Естественно покупать такой модуль ЭБУ придётся непосредственно владельцу транспортного средства, который решил внести существенные изменения в двигатель. Существенные модификации, в частности, подразумевают:
- установку новой конструкции распредвала,
- внедрение турбины,
- изменение выхлопной системы,
- дополнение интеркулером и т. д.
Здесь оригинальный модуль ЭБУ явно не даст создать новую конфигурацию мотора, соответственно потребует замены новым, поддерживающим требуемые функции или допускающим перепрограммирование.
Электронный блок управления программируемый, даёт возможность:
- контролировать дозирование топлива в каждый цилиндр,
- устанавливать зависимость от положения дроссельной заслонки,
- устанавливать зависимость от датчиков педали акселератора,
- регулировать объём всасываемого воздуха.
Такие корректировки вполне допустимо произвести при помощи соответствующих программ для ноутбука или домашнего стационарного компьютера.
Блок управления двигателем программирование
Таблица значений, считанных датчиками и движение по этим значениям, делается программированием для отображения ЭБУ. Настольный домашний компьютер используется, если транспортное средство стоит в гараже. Однако программирование можно производить непосредственно в процессе вождения с помощью портативного компьютера.
Пример программного обеспечения современной разработки для работы с электронными блоками управления моторами новых автомобилей
На картинке выше пример современного ПО, посредством которого выполняется программирование ЭБУ двигателем. По сути, на основании данных и постоянного контроля лямбда-зонда компьютер способен регулировать:
- момент зажигания,
- ограничение максимальных оборотов,
- работу турбины,
- работу холодного двигателя,
- дозирование топлива,
- изменение впрыска топлива при низком давлении в системе.
Изменением значений при настройке ЭБУ, лямбда-зонд в любой момент контролирует топливную смесь. Тюнер определит оптимальное количество впрыскиваемого топлива при всех комбинациях оборотов двигателя и положения дроссельной заслонки. Более сложные модели электронных блоков управления дают больше возможностей настройки.
Например, допустимо ограничить мощность двигателя на первой передаче, чтобы не повредить двигатель и другие детали автомобиля. Также можно ограничить мощность турбины регулирующим клапаном, направляющим выхлопные газы двигателя, чтобы точно управлять двойными форсунками на цилиндр.
Тем самым достигается точность дозировки топлива и распыления впрыска топлива при больших оборотах двигателя. Возможно управление переменными распределительными валами или продолжительностью открытия клапанов двигателя, а также мониторинг работы мотора в моменты переключения секвентальной коробки передач.
Электронный блок управления имеет коммуникационный чип проверки точности всех данных и электронных элементов двигателя. Однако ЭБУ также имеет сигнальную лампу на приборной панели машины. Это световой сигнал о неисправности или отказе двигателя. Контрольный индикатор неисправности, помеченный подписью «Проверка двигателя».
При помощи информации: EcuDepot
Диагностика ЭБУ с помощью мультиметра
Для диагностики ЭБУ с помощью мультиметра необходимо следующее оборудование:
| № | Наименование |
|---|---|
| 1 | Мультиметр |
| 2 | Адаптер для подключения к автомобильным разъемам |
| 3 | Схемы и руководства по диагностике ЭБУ |
Для начала диагностики необходимо подключить мультиметр к автомобилю с помощью адаптера. Затем следует изучить схемы и руководства по диагностике, чтобы понять, какие параметры необходимо измерить.
Основные параметры, которые можно измерить с помощью мультиметра, включают:
- Напряжение на разъеме ЭБУ
- Сопротивление на контактах ЭБУ
- Сигналы с датчиков, связанных с ЭБУ
- Рабочие токи и напряжение на выводах ЭБУ
Измерение этих параметров позволяет определить состояние работы ЭБУ и выявить возможные неисправности. Результаты измерений следует сравнить с рекомендованными значениями из схем и руководств.



![Obd2 protocols by vehicle make and model [updated list] - obd planet](https://okz-rybinsk.ru/wp-content/uploads/7/6/2/762799d7e5c7d3f89e6f1a449f4f0107.jpeg)
Важно помнить, что диагностика ЭБУ с помощью мультиметра требует основных знаний в области автомобильной электроники и схемотехники. Неправильное подключение мультиметра или некорректное интерпретация результатов могут привести к неправильным выводам и ухудшить состояние автомобиля
В случае сложностей или неуверенности в проделанных измерениях рекомендуется обратиться к специалистам или использовать другие способы диагностики ЭБУ.
Использование осциллографа для детального анализа сигналов
Осциллограф работает по принципу измерения изменения напряжения во времени. Он позволяет записывать и отображать сигналы, генерируемые различными датчиками и актуаторами, что дает возможность проанализировать работу ЭБУ в реальном времени.
Для использования осциллографа необходимо подключить его к автомобильной электрической системе. Перед подключением необходимо убедиться, что напряжение осциллографа соответствует напряжению системы автомобиля. Затем необходимо подключить зонды осциллографа к нужным точкам на проводах или контактах, чтобы получить сигналы для анализа.
Осциллограф позволяет визуально анализировать форму сигнала, его амплитуду, частоту и временные характеристики. Благодаря этому, можно выявить аномалии, такие как помехи, искажения или снижение амплитуды сигналов.
С помощью осциллографа можно проверить работу различных датчиков и актуаторов, а также определить причину возникновения ошибок в работе ЭБУ. Например, осциллограф позволяет идентифицировать неисправности в датчике кислорода, топливном насосе или зажигании автомобиля.
Важно отметить, что использование осциллографа требует определенных навыков и знаний. Для правильного анализа сигналов необходимо знать, как они должны выглядеть в нормальной работе автомобиля
Также требуется опыт в интерпретации результатов и выявлении потенциальных проблем.
Что такое протокол OBD2?
Системы самодиагностики автомобилей существуют с 1969 года, когда компания Volkswagen представила их миру. Эти бортовые компьютеры предоставляют владельцам транспортных средств и специалистам по ремонту важную информацию о текущем состоянии двигателя и других подсистем. Однако вплоть до 1990-х годов они сильно зависели от производителя.
В 1991 году калифорнийские законодатели создали первый универсальный стандарт бортовой диагностики для снижения выбросов выхлопных газов автомобилей. Пять лет спустя стандарт был расширен по всей стране и стал стандартом OBD2, который в настоящее время используется в отрасли. Вы гарантированно получите соответствующий автомобиль, если он был изготовлен позже,
Разъемы протокола OBD2
Стандарт требует, чтобы все транспортные средства отслеживали и записывали определенные рабочие параметры транспортного средства. Вы получаете доступ к этим данным через универсальный диагностический разъем OBD2. Этот разъем поставляется в двух вариантах в соответствии со стандартом электроники SAE J196.
Разъемы обоих форматов представляют собой 16-контактные гнезда D-образной формы с канавкой, расположенной между двумя рядами контактов. Разработанный для 12-вольтовых систем, тип A имеет канавку, проходящую по всей длине порта. С другой стороны, тип B имеет разрезную канавку и может выдерживать напряжение до 24 вольт.
Помимо этих типов разъемов, стандарт OBD2 определяет пять различных протоколов, зависящих от производителя. Каждый протокол OBDII определяет способ сбора данных, но в остальном они полностью совместимы друг с другом.
На самом деле вы можете использовать любой совместимый сканер с любым протоколом. Будут некоторые проблемы с переводом, но ничто не помешает вам выполнять свою работу.
What are the ways to check my OBD2 protocol?
OBD2 protocols: Must-have pins for the connector
Note: Pin 4 (chassis), 5(signal ground), and 16 (Vehicle Battery Positive) are must-haves for any protocols.
The easiest way to identify an OBD2 protocol is to look at the alignment and availability of the pins.
Here’s
what you need to focus on:
If there are pins 2 and 10 in
the connector with metallic pins 2, 4, 5, 10 and 16 then it’s a J1850 PWM protocol.
If you can see pin 2 and
material contacts inside pins 2, 4, 5, and 16 but there’s no PIN 10 then it’s a
J1850 VPW protocol.
If the connector has pin 7 and an optional pin 15 then it could be ISO 9141 or ISO 14230 KWP2000. The metallic contacts inside the pins are 4, 5, 7, 15, (plus 16).
If there are both pins 14 and
6 in a connector with material contacts 4, 5, 6, 14 and 16 then it’s an ISO 15765 CAN protocol.
Какой протокол OBD2 поддерживается моим автомобилем? Осмотрите булавки!
Для большинства сканеров вам просто нужен автомобиль, совместимый с OBD2. Обычно вы можете использовать любой сканер с любым протоколом. Однако бывают случаи, когда вы хотите быть более конкретным.
Не каждый протокол OBD2 подключается к сканеру одинаково. К сожалению, единственный способ узнать, какой протокол у вас есть, — это посмотреть спецификацию контактов разъема вашего автомобиля.
Форма разъема OBD. ———
К счастью, вам нужно заботиться только о внутренних зубах. Различные протоколы имеют требования к контактам. Таким образом, вы можете сказать, что у вас есть, увидев, какие контакты присутствуют, а какие отсутствуют. Другими словами, какие контакты имеют металлические контакты в корпусе разъема.
Для начала вот список всех контактов в стандарте OBD2:
8 лучших пинов
- Зарезервировано для OEM COMM
- Шина J1850+ (положительный результат)
- Зарезервировано OEM
- Заземление каркаса/шасси автомобиля
- Заземление сигнала датчика
- OEM COMM / CAN High
- К-линия
- Зарезервировано OEM
Нижние 8 пинов
- ОЕМ СВЯЗЬ
- Шина J1850- (минус)
- Зарезервировано OEM
- Зарезервировано OEM
- Зарезервировано OEM
- OEM зарезервировано / CAN Low
- L-образная линия
- Отключение питания (12 В)
Вы должны сопоставить этот макет с физическими контактами в вашем автомобиле, чтобы увидеть, какой у вас протокол OBD2.
| Протоколы OBD2 | Контакт 2 | Контакт 4 | Контакт 5 | Контакт 6 | Контакт 7 | Контакт 10 | Контакт 14 | Контакт 15 | Контакт 16 td> |
| SAE J1850 VPW | X | X | X | X | |||||
| ШИМ SAE J1850 | X | X | X | X | X | ||||
| ISO 9141-2 | X | X | X | X | X | ||||
| ISO 14230 KWP2000 | X | X | X | X | |||||
| ISO 15765-4/SAE J2480 (CAN) | X | X | X | X | X |
Что такое VCU (блок управления транспортным средством)?
Блок управления транспортным средством (VCU) является важным компонентом, используемым исключительно в электромобилях. VCU — это электронный блок управления, отвечающий за управление системами питания и аккумуляторной батареи автомобиля. Его часто называют «дорожным компьютером» электромобилей. Напротив, в автомобилях с традиционным топливом для этой цели используется электронный блок управления (ECU).
 Блок управления транспортным средством
Блок управления транспортным средством
VCU собирает данные с различных датчиков, чтобы определить намерения водителя, включая педаль акселератора, положение передачи, педаль тормоза и состояние автомобиля (скорость, температура и т. д.). Затем он обрабатывает эти данные, чтобы отправить команды управления системам питания и аккумуляторной батареи автомобиля. VCU также управляет бортовой вспомогательной системой питания. Эта система включает в себя такие функции, как кондиционер, отопление и развлекательные системы, что делает VCU центральным компонентом общей системы управления автомобилем.
Одной из важнейших функций VCU является управление энергоэффективностью автомобиля. VCU может оптимизировать системы питания и аккумуляторов, чтобы гарантировать эффективное использование энергии и возможность проезда транспортного средства на максимально возможное расстояние без подзарядки. Кроме того, VCU может управлять циклами зарядки и разрядки аккумуляторной батареи автомобиля, чтобы продлить срок ее службы и предотвратить повреждение.
VCU также включает в себя функции диагностики неисправностей, защиты и системного хранения. Он может обнаруживать и диагностировать проблемы с системами автомобиля, обеспечивать защиту от перезарядки и чрезмерной разрядки аккумулятора, а также хранить данные о производительности и использовании автомобиля.




Поскольку электромобили продолжают развиваться, VCU становится все более сложным и функциональным. VCU обладает расширенными возможностями, которые постоянно развиваются с развитием технологий. Например, с введением искусственный интеллект и машинное обучение, VCU может учиться на поведении водителя. Это обучение позволяет VCU регулировать характеристики автомобиля в соответствии с предпочтениями водителя и стилем вождения.
Types of Addressing in CAN-TP (ISO 15765) Protocol
The main purpose of addressing in CAN-TP is for how to identify, either it is a non CAN-TP message or CAN-TP message. To identify it, there ae 2 types of addressing defined in the ISO 15765-2 standard.
- Basic Addressing.
- Extended Addressing.
Basic Addressing in CAN-TP (ISO 15765)
The CAN-TP Protocol basic addressing mode is called a normal addressing mode were to identify the CAN message or CAN-TP, we are using the CAN Identifier. So for this, there will be some identifier will be for CAN-TP, where if any message will receive then the server will understand that this TP message. The advantages of this type of addressing are that full 8 bytes of the data packet can be sent as data.
In basic addressing, each message is addressed to a specific node on the network using a unique identifier called a “Node Address.” Each node on the network is assigned a unique Node Address, which is typically configured by the user or by a configuration tool.
When a node wants to send a message, it includes the destination Node Address in the message header. When the message is received by the other nodes on the network, they compare the destination Node Address in the message header to their own Node Address. If the Node Address matches, the node accepts the message and processes it. If the Node Address does not match, the node ignores the message.
Extended Addressing in CAN-TP (ISO 15765)
Extended Addressing is a feature of the ISO 15765-2 Transport Protocol (CAN-TP) that allows messages to be addressed to a larger number of nodes on a Controller Area Network (CAN) than is possible with Basic Addressing. In Extended Addressing, the identifier field of the CAN message header is used to transmit the destination Node Address, which can be up to 29 bits in length. This allows for a much larger address space, with up to 536,870,912 possible Node Addresses, compared to the 8-bit Node Addresses used in Basic Addressing.
Extended Addressing also allows for dynamic addressing, where nodes can be added or removed from the network without requiring reconfiguration of the Node Addresses. This is accomplished through the use of a “Dynamic Addressing” scheme, where a unique “Arbitration ID” is assigned to each node, and the Node Address is transmitted in the data portion of the message.
When a node sends a message using Extended Addressing, it includes the destination Node Address in the identifier field of the CAN message header. When the message is received by the other nodes on the network, they compare the destination Node Address in the message header to their own Node Address. If the Node Address matches, the node accepts the message and processes it. If the Node Address does not match, the node ignores the message.
This addressing mode is the CAN-TP addressing mode where the 1st byte of the CAN data field will be used for the additional elements of the address whereby it reducing the data payload by one byte. The primary task of the transport protocol is to transfer messages which cannot be transmitted as a single Protocol Data Unit (PDU) due to their length. Messages which contain more data that can be transmitted within a single PDU are segmented by means of the transport protocol and divided into multiple, separate PDUs.
This procedure can also be implemented on the data link layer. The segmentation of the message must then be carried out in PDUs of the corresponding data link protocol. So to send the data like CAN, the CAN-TP Protocol has been designed. Let us discuss how it can send multiple frames.